Все расчёты по определению масс звеньев, координат центров масс звеньев, моментов инерции звеньев, сил тяжести, сил инерции, моментов сил инерции, рабочей нагрузки представлены в приложении в протоколе MathCad.
3) Рассмотрим звенья 4 и 5:
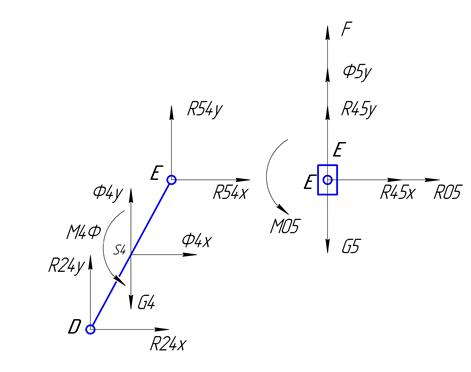
Рис. 2.1. Звенья 4 и 5
Из уравнений кинетостатики звена 5:
Из уравнений кинетостатики звена 4:

4) Рассмотрим звенья 2 и 3:
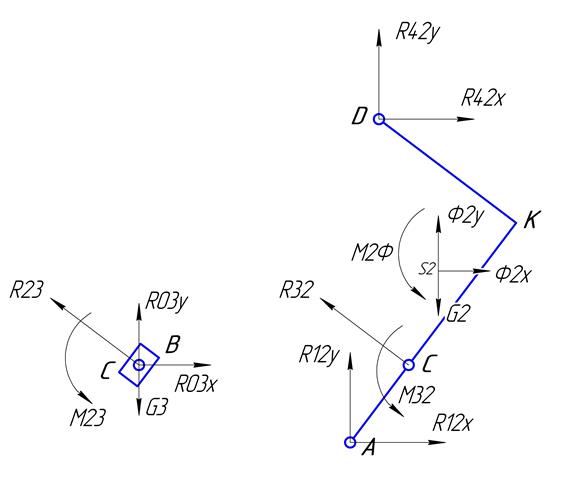
Рис.2.2. Звенья 2 и 3
Из уравнений кинетостатики звена 3:
Из уравнений кинетостатики звена 2:

5) Звено 1:
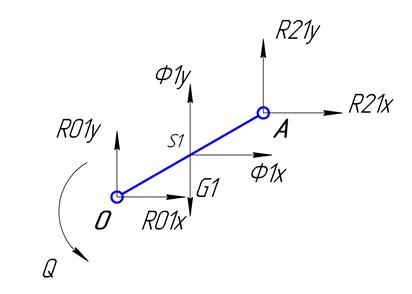
Рис.2.3. Звено 1
Из уравнений кинетостатики звена 1:
Решения уравнений кинетостатики представлены в приложении в протоколе MathCad.
Найдем движущий момент Q с помощью общего уравнения динамики:


2) 5-ое звено
Условие равновесия звена 5:
![]()
![]()
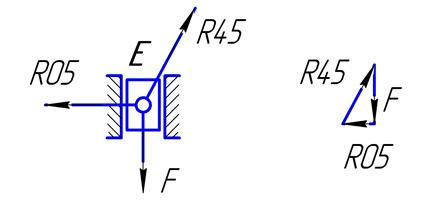
Рис. 3.1. Ползун Е
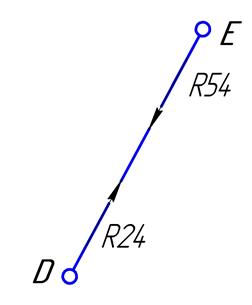
2) 4-ое звено
Условие равновесия звена 4:
![]()
![]()
![]()
Рис. 3.2. Шатун DE
3) 2-ое звено
Условие равновесия звена 2:
![]() где
где ![]()

Рис. 3.3 Звено AKD
6) 3-е звено
Условие равновесия звена 3:
![]()
![]()
![]()
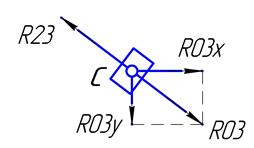
Рис. 3.4. Камень С
7) 1-е звено
Условие равновесия звена 1:
![]()
![]() откуда
откуда
![]()
![]()
![]()
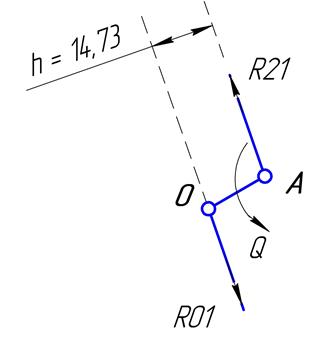
Рис. 3.5. Кривошип ОА
При ![]() .
.
|
Стандартная программа |
Протокол |
||
|
Rx01 |
-8.042692*10^4 |
-8.042692*10^4 |
|
|
Ry01 |
2.311047*10^5 |
2.311047*10^5 |
|
|
Rx03 |
1.458864*10^5 |
1.458864*10^5 |
|
|
Ry03 |
-1.101895*10^5 |
-1.101895*10^5 |
|
|
R05 |
-6.539722*10^4 |
-6.539722*10^4 |
- |
|
Rx12 |
-8.042429*10^4 |
-8.042429*10^4 |
|
|
Ry12 |
2.31062*10^5 |
2.31062*10^5 |
|
|
Rx21 |
8.042429*10^4 |
8.042429*10^4 |
|
|
Ry21 |
-2.31062*10^5 |
-2.31062*10^5 |
- |
|
Rx24 |
6.541627*10^4 |
6.541627*10^4 |
|
|
Ry24 |
1.203975*10^5 |
1.203975*10^5 |
|
|
Rx42 |
-6.541627*10^4 |
-6.541627*10^4 |
- |
|
Ry42 |
-1.217448*10^4 |
-1.217448*10^4 |
- |
|
Rx23 |
-1.458864*10^5 |
-1.458864*10^5 |
- |
|
Ry23 |
1.101895*10^5 |
1.101895*10^5 |
|
|
Rx32 |
1.458864*10^5 |
1.458864*10^5 |
|
|
Ry32 |
-1.101895*10^5 |
-1.101895*10^5 |
|
|
Rx45 |
6.539722*10^4 |
6.539722*10^4 |
|
|
Ry45 |
1.202943*10^5 |
1.202943*10^5 |
|
|
Rx54 |
-6.539722*10^4 |
-6.539722*10^4 |
- |
|
Ry54 |
-1.202943*10^5 |
-1.202943*10^5 |
- |
|
Q |
3.605053*10^4 |
3.605053*10^4 |
|
|
M05 M23 M32 |
0 |
0 |
0 |
|
1. Геометрический анализ механизма. |
|
1,1. Исходные данные: |
|
- певая структурная группа |
|
длина кривошипа (OA) |
|
- вторая структурная группа - ВВП1 (первая группа Ассура) |
|
длина шатуна (AB) |
|
расстояние от оси O вращения кривошипа до линии движения ползуна
В |
|
сборка |
|
- третья структурная группа - ВВП2 (вторая группа Ассура) |
|
длина звена DE |
|
расстояние от оси О вращениякривошипа до линии движения ползуна
Е |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.