На рис.1.1 представлена схема механизма с нанесёнными на неё локальными осями координат.
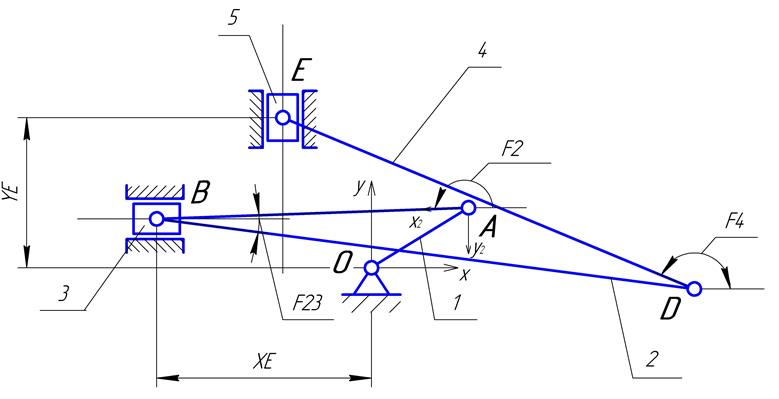
Рис.1.1. Схема механизма с нанесёнными на неё локальными осями координат
1) Определение масс звеньев:
![]() , где
, где ![]() длина звена;
длина звена; ![]() погонная
масса.
погонная
масса.
2) Определение моментов инерции звеньев:
 , где
, где ![]() масса звена;
масса звена; ![]() длина
звена.
длина
звена.
3) Силы тяжести:
![]() , где
, где ![]() масса звена;
масса звена; ![]() ускорение
свободного падения.
ускорение
свободного падения.
4) Силы инерции:
Здесь ![]() масса
звена;
масса
звена; ![]() аналоги ускорения центра масс звена;
аналоги ускорения центра масс звена; ![]() угловая скорость, заданная в начальных
условиях.
угловая скорость, заданная в начальных
условиях.
5) Моменты сил инерции:
![]() , где
, где ![]() момент инерции звена;
момент инерции звена; ![]() соответствующее угловое ускорение;
соответствующее угловое ускорение; ![]() угловая скорость, заданная в начальных
условиях.
угловая скорость, заданная в начальных
условиях.
6) Определение рабочей нагрузки
Выходное звено 5 совершает поступательное движение, поэтому рабочая нагрузка задается в виде нагрузочной диаграммы, показанной ниже:
|
|
|
Па |
|
- давление на рабочем ходу |
|
|
|
Па |
|
- давление на холостом ходу |
|
|
|
Па |
|
- атмосферное давление |
|
|
|
- ход поршня |
|
|
|
- диаметр поршня |
|
|
Рис. 1.2. Индикаторная диаграмма
При построении зависимости рабочей нагрузки от угла поворота кривошипа OA учитывается два обстоятельства:
а) рабочему ходу
соответствует больший угол поворота кривошипа DE
![]() а холостому ходу – меньший угол поворота
а холостому ходу – меньший угол поворота ![]()
б) знак рабочей нагрузки противоположен знаку скорости выходного звена 5.
|
|
|
- нагрузка на рабочем ходу |
|
|
|
- нагрузка на холостом ходу |
|
|
Рис. 1.3. Совмещённый график аналога ускорения точки Е и рабочей нагрузки
Все расчёты по определению масс звеньев, координат центров масс звеньев, моментов инерции звеньев, сил тяжести, сил инерции, моментов сил инерции, рабочей нагрузки представлены в приложении в протоколе MathCad.
1) Рассмотрим звенья 4 и 5:
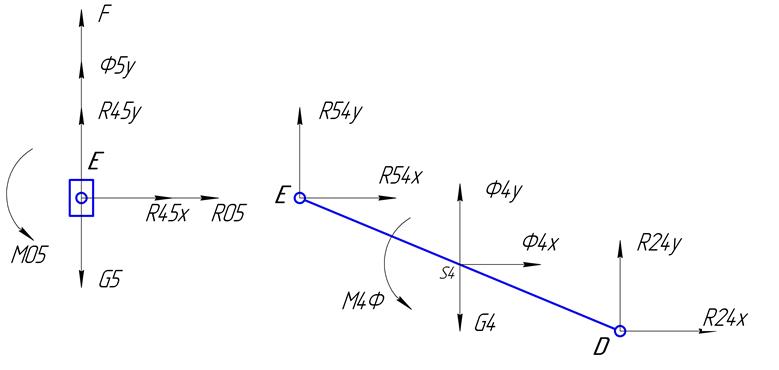
Рис. 2.1. Звенья 4 и 5
Из уравнений кинетостатики звена 5:
Из уравнений кинетостатики звена 4:

2) Рассмотрим звенья 2 и 3:
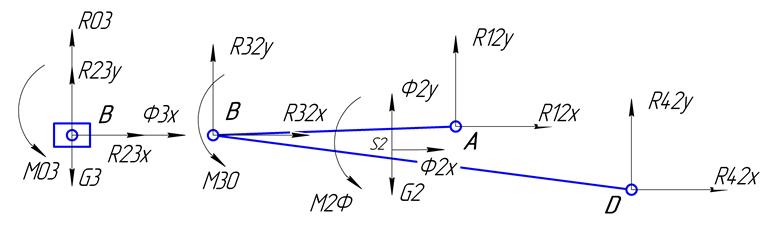
Рис.2.2. Звенья 2 и 3
Из уравнений кинетостатики звена 3:
Из уравнений кинетостатики звена 2:

3) 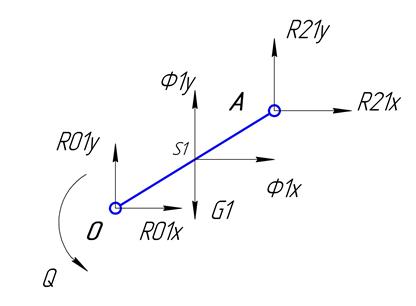 Звено 1:
Звено 1:
Рис.2.3. Звено 1
Из уравнений кинетостатики звена 1:
Решения уравнений кинетостатики представлены в приложении 1 в протоколе MathCad.
Найдем движущий момент Q с помощью общего уравнения динамики:



![]()
1) 5-ое звено
Условие равновесия звена 5:
![]()
![]()
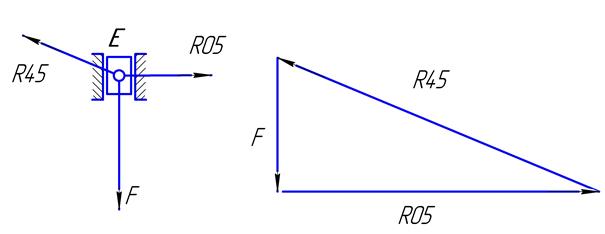
Рис. 3.1. Ползун E
2) 4-ое звено
Условие равновесия звена 4:
![]()
![]()
![]()
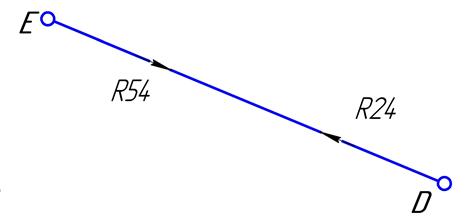
Рис. 3.2. Шатун DE
3) 2-ое звено
Условие равновесия звена 2:
![]() где
где ![]()
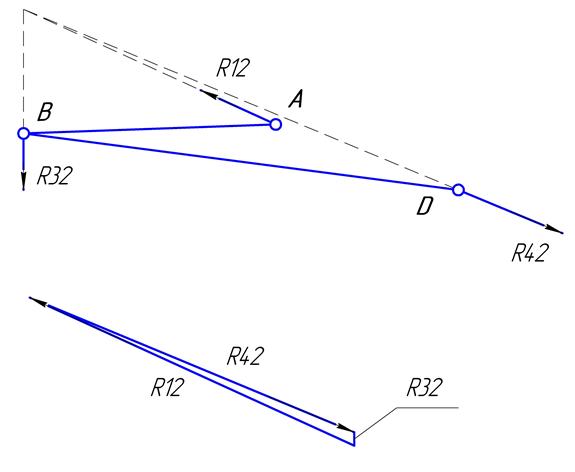
Рис. 3.3. Звено ABD
1) 3-е звено
Условие равновесия звена 3:
![]()
![]()
![]()
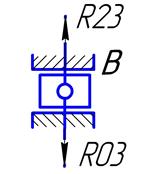
Рис. 3.4. Ползун В
2) 1-е звено
Условие равновесия звена 1:
![]()
![]() откуда
откуда
![]()
![]()
![]()
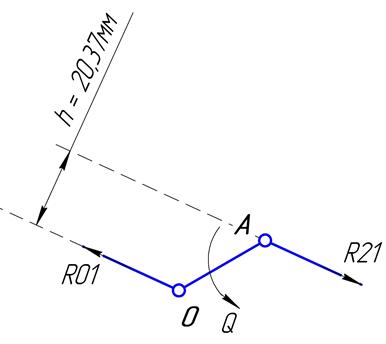
Рис. 3.5. Кривошип ОА
При ![]() . Значения реакций – в Н, значение
движущего момента – в Н∙м.
. Значения реакций – в Н, значение
движущего момента – в Н∙м.
|
Стандартная программа |
Протокол |
||
|
Rx01 |
-9.0196*10^5 |
-9.0196*10^5 |
|
|
Ry01 |
4.1256*10^5 |
4.1256*10^5 |
|
|
R03 |
-3.6874*10^4 |
-3.6874*10^4 |
- |
|
R05 |
9.0145*10^5 |
9.0145*10^5 |
|
|
Rx12 |
-9.0194*10^5 |
-9.0194*10^5 |
|
|
Ry12 |
4.125*10^5 |
4.125*10^5 |
|
|
Rx21 |
9.0194*10^5 |
9.0194*10^5 |
|
|
Ry21 |
-4.125*10^5 |
-4.125*10^5 |
- |
|
Rx24 |
-9.0159*10^5 |
-9.0159*10^5 |
|
|
Ry24 |
3.7508*10^5 |
3.7508*10^5 |
|
|
Rx42 |
9.0159*10^5 |
9.0159*10^5 |
|
|
Ry42 |
-3.7508*10^5 |
-3.7508*10^5 |
- |
|
Rx23 |
-38.4702 |
-38.4702 |
0 |
|
Ry23 |
3.6972*10^4 |
3.6972*10^4 |
|
|
Rx32 |
38.4702 |
38.4702 |
0 |
|
Ry32 |
-3.6972*10^4 |
-3.6972*10^4 |
- |
|
Rx45 |
-9.0145*10^5 |
-9.0145*10^5 |
|
|
Ry45 |
3.7477*10^5 |
3.7477*10^5 |
|
|
Rx54 |
9.0145*10^5 |
9.0145*10^5 |
|
|
Ry54 |
-3.7477*10^5 |
-3.7477*10^5 |
- |
|
Q |
2.020585*10^5 |
2.020585*10^5 |
|
|
M05 |
0 |
0 |
0 |
|
M03 |
0 |
0 |
0 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.