|
|
|
Определение движущего момента из общего уравнения динамики |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
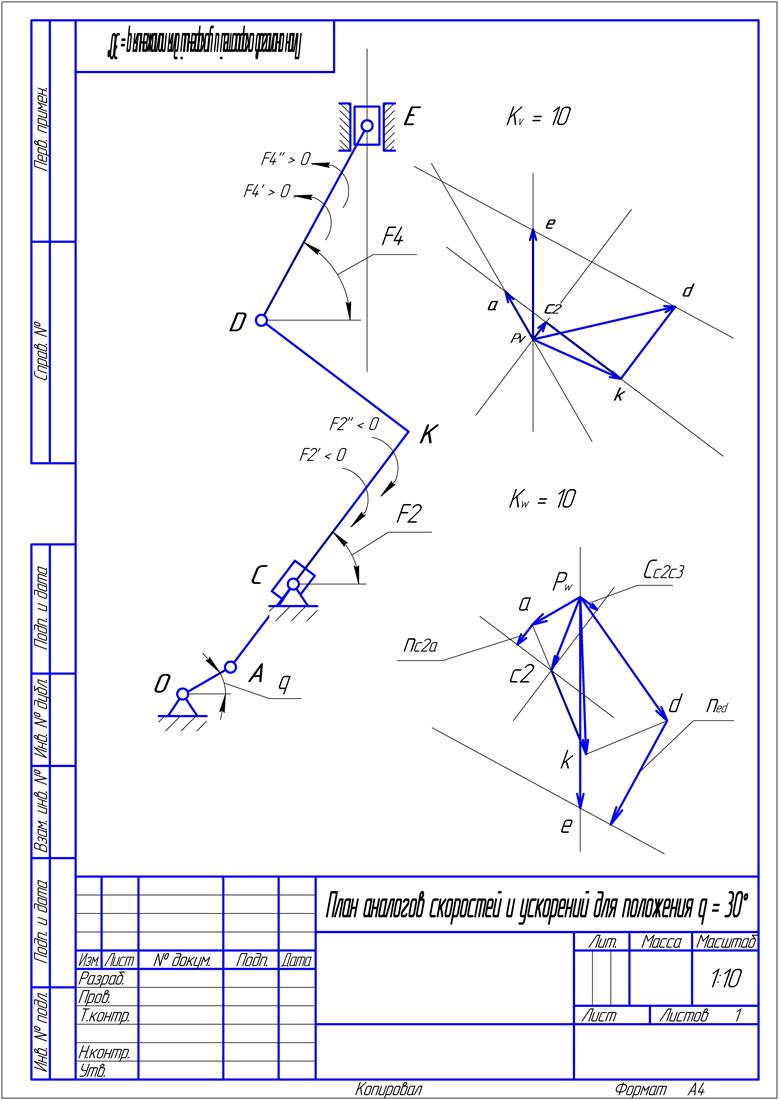
2,6. Расчет для q = 30 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
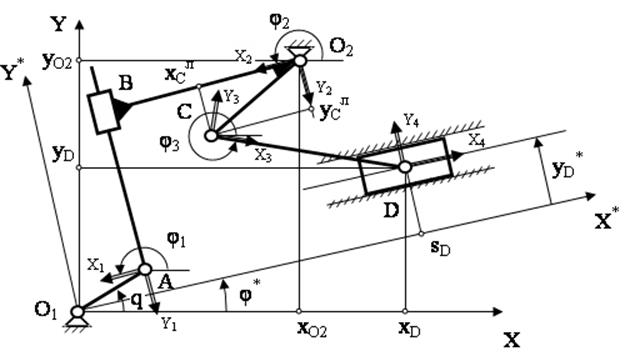
Приложение1. Геометрический анализ механизма. |
|
1,1. Исходные данные: |
|
|
|
- певая структурная группа |
|
длина кривошипа (O1A) |
|
- вторая структурная группа (первая группа Ассура) |
|
длина звена (O2B) |
|
координаты присоед. к стойке (xO2,yO2) |
|
сборка, звено присоединения |
|
локальные координаты присоединения следующей структурной группы (xCл,yCл) |
|
- третья структурная группа (вторая группа Ассура) |
|
длины звеньев |
|
координаты присоед. к стойке (yD*,*) |
|
сборка |
|
1,2. Построение функции положения. |
|
Расчет по |
|
Массив углов поворота кривошипа |
|
Заданное положение |
|
Текущий угол: |
|
Проекции координат точек на оси X,Y |
|
|
|
Проекции аналогов скоростей точек на оси X,Y |
|
|
|
Проекции аналогов ускорений точек на оси X,Y |
|
|
|
Аналоги угловых скоростей и ускорений звеньев |
|
|
|
|
|
Иходные данные |
|
- певая структурная группа |
|
|
|
- первая группа Ассура |
|
|
|
|
|
|
|
|
|
- вторая группа Ассура |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Приложение2. Кинетостатический анализ механизма. |
|
нагрузка на рабочем и холостом ходах |
|
|
|
-движущий момент из общего уравнения динамики
|
|
-проверка |
|
Реакции в кинематических парах |
|
|
|
Моменты в кинематических парах |
|
|
|
|
Евграфов А.Н., Коловский М.З., Петров Г.Н. Теория механизмов и машин. Учебное пособие / СПбГПУ. СПб., 2003. 238 с.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.