Целью геометрического анализа рычажного механизма является составление уравнений геометрического анализа, решение их, выделение побочных и основных решений, определяющих положения звеньев, а также исследование функций положения выходных звеньев структурных групп.
1) Уравнения геометрического анализа.
Здесь и далее все неизвестные, которые необходимо определить из данной системы или из данного уравнения подчёркнуты.
Функции положения для группы I (кривошип OA):
Групповые уравнение для группы II (ВВП1):
![]()
Функции положения точки D:
![]()
Уравнение для определения F3 - угла поворота BD:
![]()
![]()
Групповые уравнение для группы III (ВВП2):
![]()
![]()
Решение уравнений геометрического анализа представлено в приложении 1.
2) Решение уравнений геометрического анализа в общем виде
а) Группа ВВП1:
Перенесём все неизвестные части влево, а известные – вправо:
Выразим из нижнего уравнения ![]() , а затем по основному тригонометрическому
тождеству
, а затем по основному тригонометрическому
тождеству ![]() :
:
Здесь ![]() , то есть существуют два решения уравнения.
Этим решениям соответствуют два варианта сборки звеньев группы ВВП1.
На рис.2.1 один из них, соответствующий основному решению (-), показан
сплошными линиями, а другой, соответствующий побочному решению (+), изображен
пунктирными линиями.
, то есть существуют два решения уравнения.
Этим решениям соответствуют два варианта сборки звеньев группы ВВП1.
На рис.2.1 один из них, соответствующий основному решению (-), показан
сплошными линиями, а другой, соответствующий побочному решению (+), изображен
пунктирными линиями.
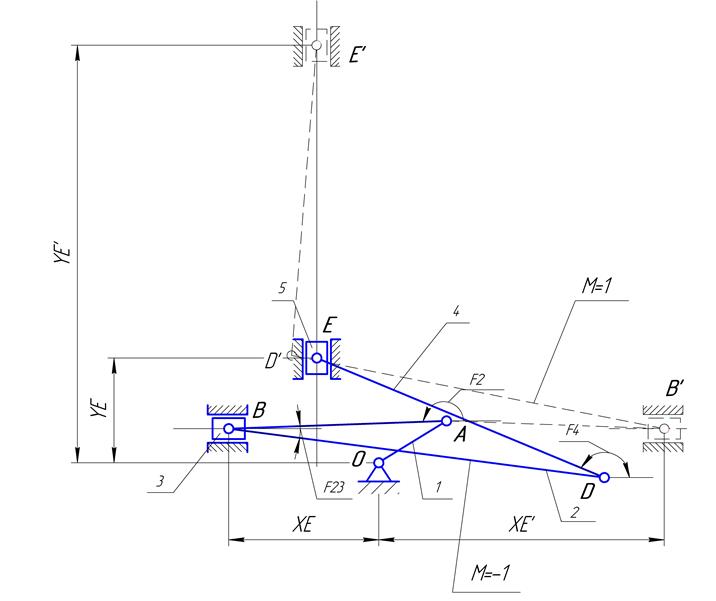
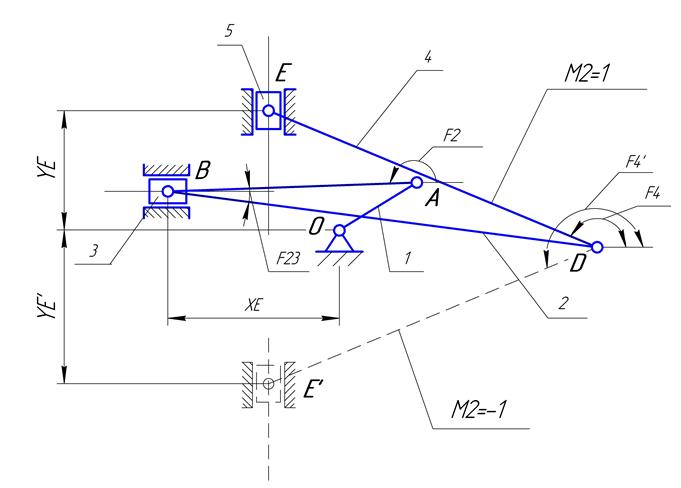
Рис.2.1. Две сборки механизма
Положение
группы типа ВВП1, при котором обход шарниров в последовательности A, B, D
происходит по часовой стрелки, соответствует способу сборки ![]() , если же обход идёт против часовой
стрелки, как в случае с AB′D’,
то способ сборки
, если же обход идёт против часовой
стрелки, как в случае с AB′D’,
то способ сборки ![]() . В
исходной схеме
. В
исходной схеме ![]() .
.
б) Группа ВВП:
Напомним, что:
Отсюда мы можем определить ![]() :
:
Тогда:
![]()
 Здесь
Здесь ![]() , то есть существуют два решения уравнения.
Этим решениям соответствуют два варианта сборки звеньев группы ВВП2.
На рис.2.2 один из них, соответствующий основному решению (+), показан
сплошными линиями, а другой, соответствующий побочному решению (-), изображен пунктирными линиями.
, то есть существуют два решения уравнения.
Этим решениям соответствуют два варианта сборки звеньев группы ВВП2.
На рис.2.2 один из них, соответствующий основному решению (+), показан
сплошными линиями, а другой, соответствующий побочному решению (-), изображен пунктирными линиями.
Рис.2.2. Две сборки механизма
Положение
группы ВВП2, при котором обход шарниров в последовательности A, D, E
происходит против часовой стрелки, соответствует способу сборки ![]() , если же обход идёт по часовой стрелки,
как в случае с ADE′, то способ сборки
, если же обход идёт по часовой стрелки,
как в случае с ADE′, то способ сборки ![]() .
.
В
исходной схеме ![]() .
.
Далее найдём ![]() :
:
![]()
Все расчёты представлены в приложении в протоколе MathCad.
Из неравенства
 можно получить условие существования группы
ВВП1:
можно получить условие существования группы
ВВП1:
![]()
Из неравенства
 несложно
получить условие существования группы ВВП2:
несложно
получить условие существования группы ВВП2:
![]()
Масштаб 1:10 см
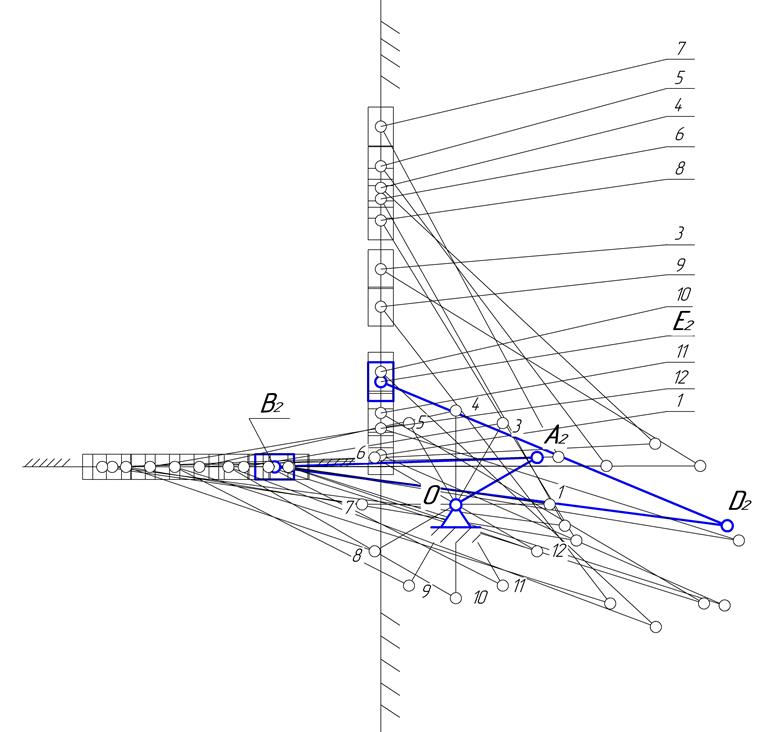
Рис.2.3. План 12 положений механизма
1) Дифференцируя уравнения геометрического анализа для группы I (кривошипа) по q, мы получаем аналог скорости точки A:
Дифференцируя уравнения второй раз, мы получаем аналог ускорения точки A:
2) Дифференцируя уравнения геометрического анализа для группы ВВП1 по q, мы получаем следующее:
Отсюда мы можем найти аналог
угловой скорости звена АВD ![]() и аналог скорости ползуна В
и аналог скорости ползуна В ![]() :
:
![]()
Дифференцируя уравнения второй раз, мы получаем следующее:

Отсюда мы можем найти аналог
углового ускорения звена АВD ![]() и аналог ускорения ползуна В
и аналог ускорения ползуна В ![]() :
:
![]()
Якобианом системы уравнений группы ВВП1 будет являться определитель следующей матрицы:

Здесь  , а
, а  .
.
Когда якобиан обращается в ноль, мы получаем:
![]()
Следовательно,
якобиан обращается в ноль при  ,
, ![]() . Это означает, что якобиан обращается в
ноль в тех положениях, при которых шатун AB расположен перпендикулярно горизонтальной прямой, по которой
ходит ползун B. Это – особое (сингулярное)
положение группы BBП1. В действительности же
этого не происходит, так как не выполняется условие существования группы ВВП1:
. Это означает, что якобиан обращается в
ноль в тех положениях, при которых шатун AB расположен перпендикулярно горизонтальной прямой, по которой
ходит ползун B. Это – особое (сингулярное)
положение группы BBП1. В действительности же
этого не происходит, так как не выполняется условие существования группы ВВП1:
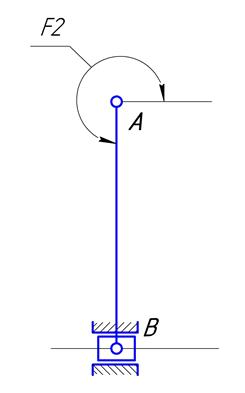
Рис.3.1. Особое положение группы ВВП1
3) Дифференцируя уравнения функции положения точки D по q, мы получаем аналог скорости точки D:
Дифференцируя уравнения второй раз, мы получаем аналог ускорения точки D:

4) Группа ВВП2:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.