|
Графический метод |
Стандартная программа |
Протокол |
|
|
XA |
0.129904 |
0.129904 |
0.129904 |
|
YA |
0.075 |
0.075 |
0.075 |
|
X'A |
-0.075 |
-0.075 |
-0.075 |
|
Y'A |
0.129904 |
0.129904 |
0.129904 |
|
X"A |
-0.129904 |
-0.129904 |
-0.129904 |
|
Y"A |
-0.075 |
-0.075 |
-0.075 |
|
XK |
0.612344 |
0.612344 |
0.612344 |
|
YK |
0.713163 |
0.713163 |
0.713163 |
|
X'K |
0.237602 |
0.237602 |
0.237602 |
|
Y'K |
-0.106418 |
-0.106418 |
-0.106418 |
|
X"K |
0.015894 |
0.015894 |
0.015894 |
|
Y"K |
-0.425862 |
-0.425862 |
-0.425862 |
|
XD |
0.213492 |
0.213492 |
0.213492 |
|
YD |
1.014688 |
1.014688 |
1.014688 |
|
X'D |
0.385304 |
0.385304 |
0.385304 |
|
Y'D |
0.088958 |
0.088958 |
0.088958 |
|
X"D |
0.235183 |
0.235183 |
0.235183 |
|
Y"D |
-0.334738 |
-0.334738 |
-0.334738 |
|
XE |
0.000000 |
0.000000 |
0.000000 |
|
YE |
1.541863 |
1.541863 |
1.541863 |
|
X'E |
0.000000 |
0.000000 |
0.000000 |
|
Y'E |
0.298362 |
0.298362 |
0.298362 |
|
X"E |
0.000000 |
0.000000 |
0.000000 |
|
Y"E |
-0.571713 |
-0.571713 |
-0.571713 |
|
F2 |
52.911337◦ |
0.923477 (52.911337º) |
0.923477 |
|
F'2 |
-0.489847 |
-0.489847 |
-0.489847 |
|
F"2 |
-0.409864 |
-0.409864 |
-0.409864 |
|
F4 |
61.476914º |
1.072975 (61.476914º) |
1.072975 |
|
F'4 |
0.730884 |
0.730884 |
0.730884 |
|
F"4 |
0.155799 |
0.155799 |
0.155799 |
На рис.1.1 представлена схема механизма с нанесёнными на неё локальными осями координат.
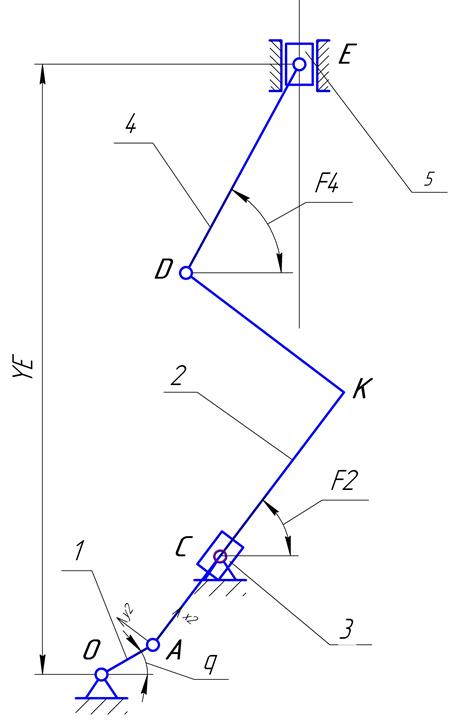
Рис.1.1. Схема механизма с нанесёнными на неё локальными осями координат
6) Определение масс звеньев:
![]() , где
, где ![]() длина звена;
длина звена; ![]() погонная
масса.
погонная
масса.
7) Определение моментов инерции звеньев:
 , где
, где ![]() масса звена;
масса звена; ![]() длина
звена.
длина
звена.
8) Силы тяжести:
![]() , где
, где ![]() масса звена;
масса звена; ![]() ускорение
свободного падения.
ускорение
свободного падения.
9) Силы инерции:
Здесь ![]() масса
звена;
масса
звена; ![]() аналоги ускорения центра масс звена;
аналоги ускорения центра масс звена; ![]() угловая скорость, заданная в начальных
условиях.
угловая скорость, заданная в начальных
условиях.
10) Моменты сил инерции:
![]() , где
, где ![]() момент инерции звена;
момент инерции звена; ![]() соответствующее угловое ускорение;
соответствующее угловое ускорение; ![]() угловая скорость, заданная в начальных
условиях.
угловая скорость, заданная в начальных
условиях.
11) Определение рабочей нагрузки
Выходное звено 5 совершает поступательное движение, поэтому рабочая нагрузка задается в виде нагрузочной диаграммы, показанной ниже:
|
|
|
Па |
|
- давление на рабочем ходу |
|
|
|
Па |
|
- давление на холостом ходу |
|
|
|
Па |
|
- атмосферное давление |
|
|
|
- ход поршня |
|
|
|
- диаметр поршня |
|
|
Рис. 1.2. Индикаторная диаграмма
При построении зависимости рабочей нагрузки от угла поворота кривошипа OA учитывается два обстоятельства:
а) рабочему ходу
соответствует больший угол поворота кривошипа DE
![]() а холостому ходу – меньший угол поворота
а холостому ходу – меньший угол поворота ![]()
б) знак рабочей нагрузки противоположен знаку скорости выходного звена 5.
|
|
|
- нагрузка на рабочем ходу |
|
|
|
- нагрузка на холостом ходу |
|
|
Рис. 1.3. Совмещённый график аналога ускорения точки Е и рабочей нагрузки
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.