|
|
|
|
|
5-е звено ( ползун E) |
|
|
|
|
|
|
|
|
|
2,4. Определение нагрузки |
|
|
|
Па |
|
|
|
Па |
|
|
|
Па |
|
|
|
- ход поршня |
|
|
|
- диаметр поршня |
|
|
|
|
|
|
|
|
|
|
|
2,5. Определение реакций в кинематических парах |
|
- 5-ое звено (ползун Е) |
|
|
|
|
|
|
|
|
|
|
|
|
|
- 4-ое звено (шатун DЕ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
- 3-ое звено (ползун В) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- 2-ое звено (ABD) |
|
|
|
|
|
|
|
|
|
|
|
|
|
- 1-ое звено (кривошип OA) |
|
|
|
|
|
|
|
|
|
Q - движущий момент |
|
|
|
|
|
|
|
Определение движущего момента из общего уравнения динамики |
|
|
|
|
|
|
|
|
|
|
|
|
|
2,6. Расчет для q = 30 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
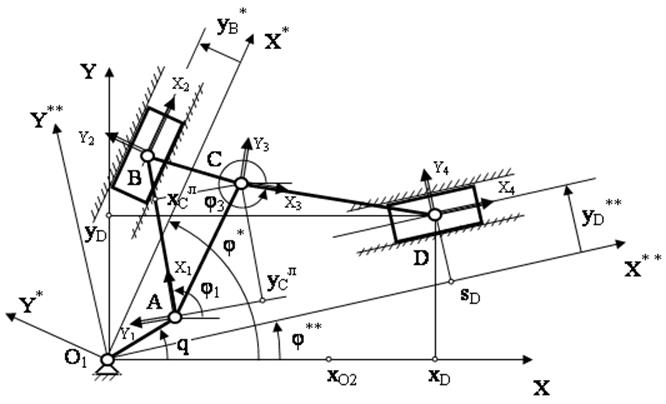
Приложение1. Геометрический анализ механизма. |
|
1,1. Исходные данные: |
|
|
|
- певая структурная группа |
|
длина кривошипа (O1A) |
|
- вторая структурная группа (первая группа Ассура) |
|
длина звена (AB) |
|
координаты присоед. к стойке (yB*,*) |
|
сборка, звено присоединения |
|
локальная координата присоединения следующей структурной группы (xCл,yCл) |
|
- третья структурная группа (вторая группа Ассура) |
|
длина звена (CD) |
|
координаты присоед. к стойке (yD**,) |
|
сборка |
|
1,2. Построение функции положения. |
|
Расчет по |
|
Массив углов поворота кривошипа |
|
Заданное положение |
|
Текущий угол: |
|
Проекции координат точек на оси X,Y |
|
|
|
Проекции аналогов скоростей точек на оси X,Y |
|
|
|
Проекции аналогов ускорений точек на оси X,Y |
|
|
|
Аналоги угловых скоростей и ускорений звеньев |
|
|
|
|
|
- певая структурная группа |
|
|
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.