Здесь w t – угол между радиусом 0С1 (С1 – центр масс кулачка) и осью x, r1= 0С1, a – угол давления, Ф1 и Ф2 – силы инерции кулачка и толкателя, G1 и G2 – силы тяжести, Рпр – сила, создаваемая пружиной, прижимающей толкатель к кулачку.
б) Расчет цилиндрической зубчатой передачи. Проведем силовой анализ эвольвентной прямозубой передачи, ограничиваясь определением реакций, лежащих в плоскости движения (рис.4.15).

 Обозначим
Обозначим ![]() и
и ![]() – угловые скорости зубчатых колес, причем
– угловые скорости зубчатых колес, причем ![]() , где i – передаточное
отношение; r1 и r2 – радиусы начальных
окружностей; МС – момент сил сопротивления; a – угол зацепления передачи, являющийся в
то же время и углом давления;
, где i – передаточное
отношение; r1 и r2 – радиусы начальных
окружностей; МС – момент сил сопротивления; a – угол зацепления передачи, являющийся в
то же время и углом давления; ![]() и
и ![]() – моменты сил инерции. Составляя уравнения
кинетостатики, имеем:
– моменты сил инерции. Составляя уравнения
кинетостатики, имеем:
– для колеса 1:
R01x – R21sina = 0; R01y – R21cosa = 0; Q – R21r1cosa – ![]() = 0,
= 0,
– для колеса 2:
R02x + R12sina = 0; R02y + R12cosa =0; R12r2cosa – ![]() – MС = 0.
– MС = 0.
Решая эти уравнения, находим (учитывая, что r2 = r1i; ![]() ):
):
![]()
![]()
R01x = R12sina, R01y = R12cosa, R02x = – R12sina, R02y = – R12cosa.
Уравнение Лагранжа второго рода для механической системы:
![]() механизма,
представленная как функция от обобщенной координаты и обобщенной скорости; Q – обобщенная движущая сила;
механизма,
представленная как функция от обобщенной координаты и обобщенной скорости; Q – обобщенная движущая сила;
![]() – обобщенная
сила сопротивления, соответствующие всем активным силам, кроме
движущих. В механизме с одной степенью подвижности кинетическая энергия
всегда может быть представлена в форме
– обобщенная
сила сопротивления, соответствующие всем активным силам, кроме
движущих. В механизме с одной степенью подвижности кинетическая энергия
всегда может быть представлена в форме
![]()
![]() приведенная масса или приведенный момент инерции механизма (q- линейная или обобщенная координата). В
дальнейшем будет предполагаться, что q –
угловая координата, и выражение (6.3) записывается в форме
приведенная масса или приведенный момент инерции механизма (q- линейная или обобщенная координата). В
дальнейшем будет предполагаться, что q –
угловая координата, и выражение (6.3) записывается в форме
![]() где
J(q) –
приведенный момент инерции. Подставляя (6.4) в (6.1) и учитывая, что
где
J(q) –
приведенный момент инерции. Подставляя (6.4) в (6.1) и учитывая, что ![]()
![]()

![]() Пример
составления уравнений движения механизмов:
Пример
составления уравнений движения механизмов:
Для вращающегося звена 1 имеем ![]()
где J10 – момент
инерции звена относительно оси вращения. Для поступательно движущегося
ползуна 3 получаем ![]() Для
звена 2, совершающего сложное движение, находим кинетическую энергию,
пользуясь теоремой Кенига, известной из курса теоретической механики:
Для
звена 2, совершающего сложное движение, находим кинетическую энергию,
пользуясь теоремой Кенига, известной из курса теоретической механики: ![]()
относительно оси, проходящей через центр масс С2 и перпендикулярной плоскости движения; vC2 – скорость центра масс; w2 – угловая скорость.
![]() поворота звена 2, получаем T = T1 +T2 +T3
=
поворота звена 2, получаем T = T1 +T2 +T3
=
![]()
Выражение, стоящее в фигурных скобках, представляет собой приведенный момент инерции механизма J(q). Используя функции положения xC2(q), yC2(q), y(q), xB(q), можно было бы представить J(q) в явной форме.J(q) – периодическая функция с периодом 2p; она представима в виде ряда:
![]() коэффициенты
Фурье через дискретные значения периодической функции:
коэффициенты
Фурье через дискретные значения периодической функции:
 приближенное
представление функций J(q)
и J’(q):
приближенное
представление функций J(q)
и J’(q):
Удовлетворительная аппроксимация для l– й гармоники получается только при условии m ³ 4 l. Если силами тяжести звеньев механизма можно пренебречь,
![]()
QС часто
называется приведенным моментом сил сопротивления. Функция ![]() является также
периодической по q с периодом 2p.
является также
периодической по q с периодом 2p.
Пример механизма с линейной функцией положения.J1, J2, J3, J4, J5 – моменты инерции вращающихся масс относительно осей их вращения; z1, z2, z3, z4 – числа зубьев колес; MС – момент сил сопротивления, приложенных к ротору.

Обобщенная сила QС
определяется в соответствии с (6.2): ![]()
![]()
механизма. Отметим, что при приведении вращающихся масс момент инерции каждой из них делится на квадрат передаточного отношения, связывающего эту массу с входным звеном. Уравнение Лагранжа второго рода может быть использовано для определения обобщенной движущей силы Q.
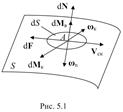
S – поверхность соприкосновения элементов кинематической пары.
Выделим на этой поверхности элементарную площадку dS
в окрестности некоторой точки A. Сила
![]() называется силой трения скольжения; момент
называется силой трения скольжения; момент ![]() – моментом трения качения, а момент
– моментом трения качения, а момент ![]() – моментом трения верчения. векторы
– моментом трения верчения. векторы ![]() и
и ![]() – противоположны по направлению соответственно
касательной
– противоположны по направлению соответственно
касательной ![]() и
нормальной
и
нормальной ![]() составляющим
вектора относительной угловой скорости. Закон Амонтона – Кулона:
составляющим
вектора относительной угловой скорости. Закон Амонтона – Кулона:
![]()
![]()
![]() (5.1)
(5.1)
где f – безразмерный коэффициент трения скольжения, а k и kВ – коэффициенты трения качения и верчения.
 (5.2)
(5.2)
Суммарная сила трения: ![]() (5.3)
(5.3)
где S – поверхность соприкосновения. Для того чтобы воспользоваться этой формулой, нужно знать закон распределения нормальных реакций по поверхности S.
 Коэффициенты трения скольжения, верчения и качения
определяются экспериментально; они зависят от многих факторов: от свойств
материала, из которого изготовлены соприкасающиеся элементы кинематических
пар, от чистоты обработки поверхностей, от наличия смазки и свойств
смазочного материала, наконец, от величины относительной скорости и
относительной угловой скорости звеньев. В механике машин значения этих
коэффициентов предполагаются заданными и постоянными.
Коэффициенты трения скольжения, верчения и качения
определяются экспериментально; они зависят от многих факторов: от свойств
материала, из которого изготовлены соприкасающиеся элементы кинематических
пар, от чистоты обработки поверхностей, от наличия смазки и свойств
смазочного материала, наконец, от величины относительной скорости и
относительной угловой скорости звеньев. В механике машин значения этих
коэффициентов предполагаются заданными и постоянными.
Формулы (5.1) и (5.2) становятся неприменимыми,если скорость скольжения в точке контакта и относительная угловая скорость равны нулю, суммарные силы и моменты сил трения в
кинематической паре могут быть определены из условий равновесия звеньев.
F = P, MК = Pּr. (5.4)
Нарушение состояния покоя (качение): ![]() (5.5)
(5.5)
где k – коэффициент трения
качения, то начнется качение цилиндра по плоскости без скольжения. Скольжение
начинается при нарушении условия ![]() , (5.6), где fn – коэффициент трения покоя, обычно несколько превышающий величину коэффициента трения
скольжения f.
, (5.6), где fn – коэффициент трения покоя, обычно несколько превышающий величину коэффициента трения
скольжения f.
Отметим попутно, что возникновение момента MK связано с деформацией цилиндра и плоскости в зоне контакта (см. рис.5.2, б) и появлением несимметрии в распределении нормальных сил, которая
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.