Выбираем на линии точку w1, лежащую правее максимума, эта точка имеет координаты: С1=0,0124, С0=0,0079121. Подставим полученные параметры в программу ASOTAR. В меню “исследование ПИД – контура управления”, задав параметры передаточной функции:

и
параметры настройки Кр= С1=0,0124 и Ти=![]() =1,5783 мин , построим переходной
процесс регулирования при m=1.
=1,5783 мин , построим переходной
процесс регулирования при m=1.
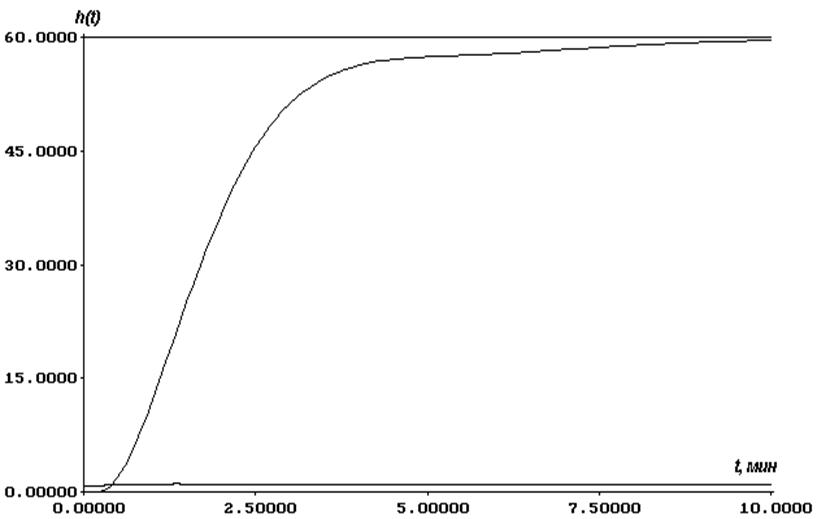
Рис. 34. Переходной процесс регулирования при m=1 и настройках регулятора С1=0,0124, С0=0,0079121.
Выбираем на линии точку w2, лежащую правее максимума, эта точка имеет координаты: С1=0,0111663, С0=0,009806. Подставим полученные параметры в программу ASOTAR.
Построим
переходной процесс регулирования при m=1 и Ти=![]() =1,1387 мин, С1=0,0111663.
=1,1387 мин, С1=0,0111663.
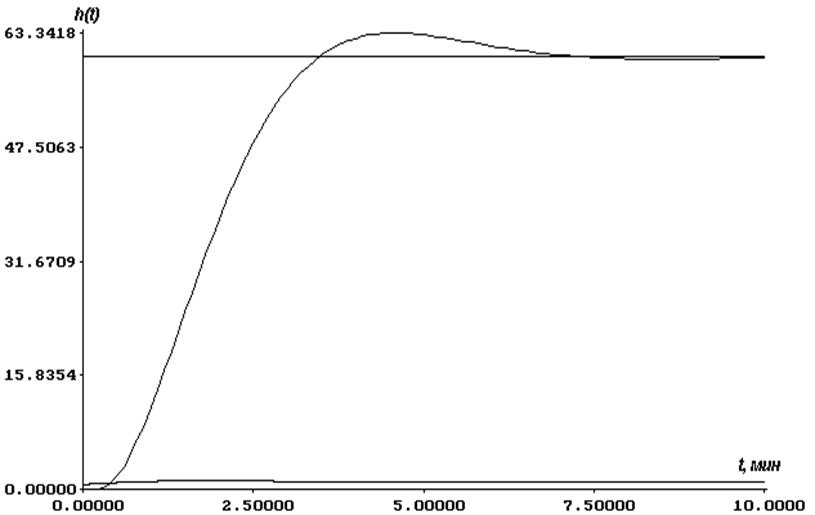
Рис. 35 Переходной процесс регулирования при m=1 и настройках регулятора С1=0,0111663, С0=0,009806.
Выбираем на линии точку w3, лежащую правее максимума, эта точка имеет координаты: С1=0,0121, С0=0,00882. Подставим полученные параметры в программу ASOTAR.
Построим
переходной процесс регулирования при m=1 и Ти=![]() =1,381 мин, С1=0,0121.
=1,381 мин, С1=0,0121.
Рис. 36 Переходной процесс регулирования при m=1 и настройках регулятора С1=0,0121, С0=0,00882.
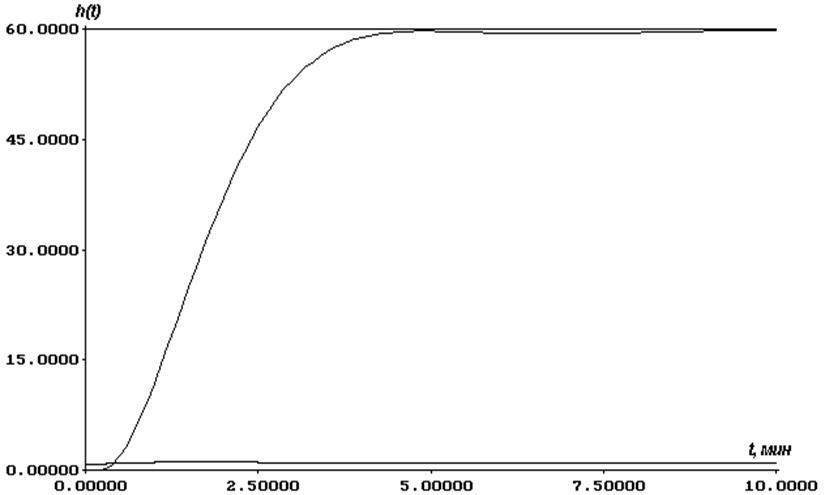
Таким образом оптимальным является третий переходной процесс при m=1 и настройках регулятора С1=0,0121, С0=0,00882т. е. Кр=0,0121 и Ти = 1,381 мин.
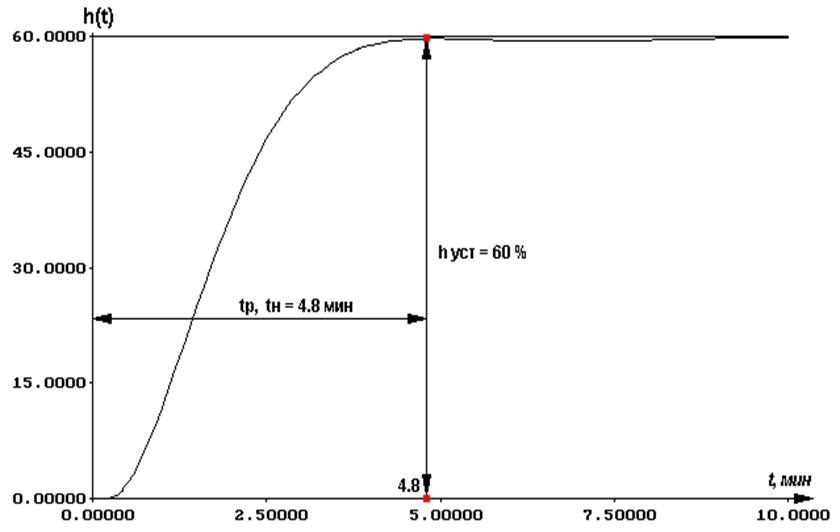
4.2.8. Оценка качества регулирования по переходному процессу замкнутой САР при настройках регулятора, найденных методом расширенных АФЧХ.
Рис. 37. Оценка качества регулирования.
1. В общем виде формула для определения интегральной оценки имеет вид:
 ≈
≈
Рис. 38. Геометрическая интерпретация интегральной оценки качества регулирования.
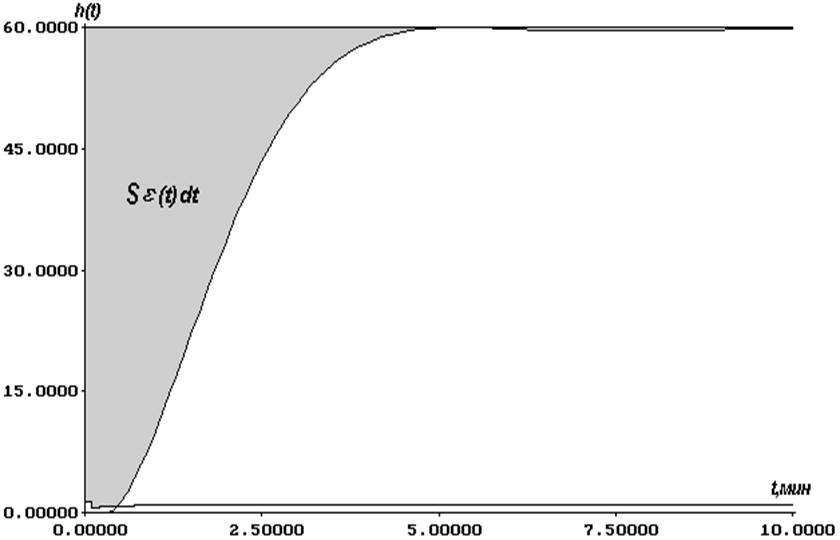
Таблица 4.5.
|
hi(t) |
0 |
0 |
0,797244 |
3,349898 |
7,181722 |
11,84977 |
16,98342 |
22,28218 |
27,51132 |
|
hуст-hi(t) |
60 |
60 |
59,20276 |
56,6501 |
52,81828 |
48,15023 |
43,01658 |
37,71782 |
32,48868 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.