Вывод: для рассматриваемого случая, исходя из переходной характеристики объекта и технологических условий выбираем регулятор непрерывного действия.
3.2. Выбор закона регулирования.
Выбор закона регулирования производится с учетом свойств объекта регулирования и заданных параметров качества переходного процесса. К качеству регулирования каждого конкретного технологического процесса, имеющего только ему присущие особенности, предъявляются конкретные требования. При выборе закона регулирования учитывают:
- свойства объекта;
- максимальную величину отклонения;
- принятый для данного технологического процесса вид типового переходного процесса;
- допустимые значения показателей качества процесса регулирования.
Для выбора закона регулирования воспользуемся номограммой, представленной на рис. 24
Рис. 24 Номограмма для определения закона регулирования.
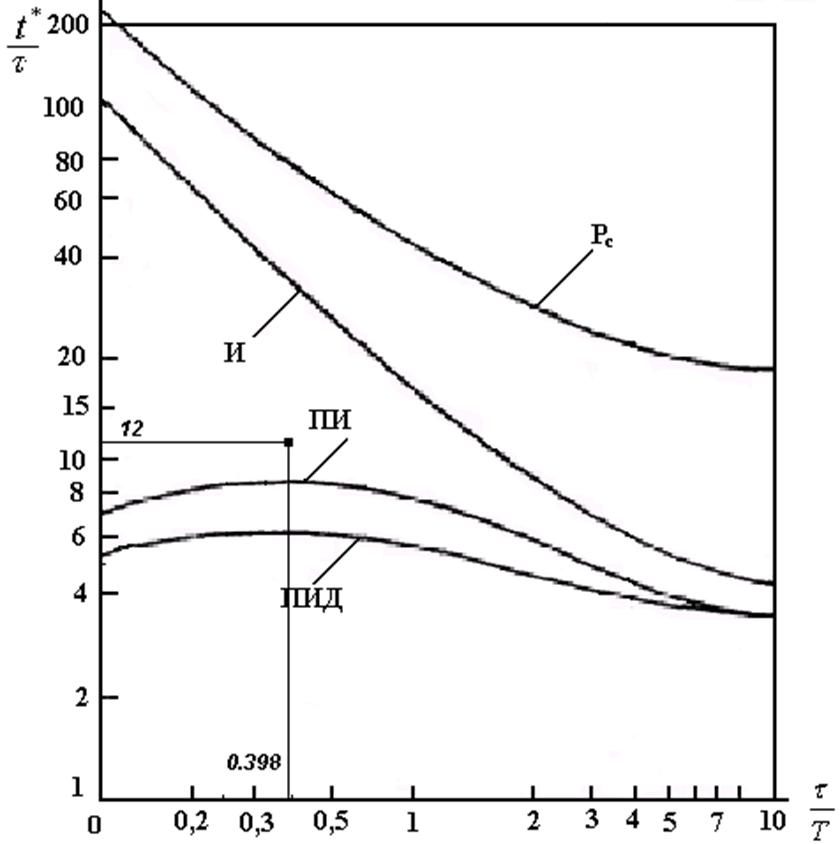
На представленной номограмме Т1* -время в течении которого желательно окончание переходного процесса.
Исходя из технологических условий Т1* принимаем равной Т1*=4 мин., так как при уменьшении времени переходного процесса более 4 мин. необходимо будет увеличить расход греющего пара в подогревателях щелока, что может привести:
1. К нарушению технологического процесса.
2. Быстрому изнашиванию конденсатопровода, вследствие высокого температурного воздействия.
3. Нарушению гидравлического режима движения среды.
Таким
образом при ![]() =
=![]() и
и ![]() =12 выбираем закон
регулирования по номограмме.
=12 выбираем закон
регулирования по номограмме.
Как видно из представленного рисунка точка на номограмме располагается ближе к граничной линии ПИ – закона регулирования.
Таким образом по представленной на рис*** номограмме, исходя из условий технологического процесса, в качестве закона регулирования выбираем ПИ – закон.
В данном законе регулирования перемещение регулирующего органа пропорционально сумме отклонения и интегралу от отклонения регулируемой величины.
![]() ,
,
Скорость регулирования пропорциональна отклонению регулируемой величины и ее производной:
![]() ,
,
![]() ,
,
Передаточная функция регулятора имеет вид:
 ,
,
где С0, С1 – настроечные параметры.
ПИ-регулятор является астатическим, с двумя настроечными параметрами.
ПИ-регулятор поддерживает установившееся значение регулируемой величины. При отклонении текущего значения от заданного регулятор в начальный момент времени переместит рабочий орган на величину, пропорциональную величине отклонения. Но если при этом Хоб не придет к заданному значению, ПИ-регулятор будет продолжать перемещать рабочий орган.
При малом значении Кр ПИ-регулятор может работать с объектами, имеющими значительное запаздывание.
Амплитудно-фазовая характеристика получается, как обычно, заменой оператора p на jw:
 ,
,
или в показательной форме:
 ,
,
где
 и
и ![]() ,
,
По величине угла опережения этот регулятор занимает промежуточное положение между П- и И- регуляторами, т. к.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.