Министерство образования Российской Федерации
Рязанская государственная радиотехническая академия
А.И.БОБИКОВ, А.М.НИКИТИН
ПРОЕКТИРОВАНИЕ ЛИНЕЙНЫХ СИСТЕМ УПРАВЛЕНИЯ
У ч е б н о е п о с о б и е
Рекомендовано УМО по образованию
в области радиотехники, электроники, биомедицинской техники и автоматизации в качестве учебного пособия
для студентов высших учебных заведений, обучающихся по специальности 210100
«Управление и информатика в технических системах»
Рязань 2004
УДК 681.306(075.8)
Проектирование линейных систем управления с SISO DESIGN TOOL / MATLAB: Учеб. пособие / А.И.Бобиков, А.М.Никитин; Рязан. гос. радиотехн. акад. Рязань, 2004. 88 с.
ISBN 5-7722-0212-X
Рассматриваются технологии использования графического интерфейса пользователя SISO DESIGN TOOL, входящего в состав популярного пакета MATLAB, для интерактивного проектирования линейных систем управления. Изложение сопровождается примерами, иллюстрирующими различные аспекты указанных технологий.
Предназначено для студентов специальности 210100 "Управление и информатика в технических системах".
Ил. 74. Библиогр.: 8 назв.
Проектируемая система, регулятор, корневой годограф, логарифмические частотные характеристики, модель системы, нули и полюсы, неизменяемая часть системы, переходная характеристика
Печатается по решению редакционно-издательского совета
Рязанской государственной радиотехнической академии.
Рецензент: кафедра АиММ Рязанской государственной радиотехнической академии (зав. кафедрой проф. Е.П. Чураков)
© Рязанская государственная
ISBN 5-7722-0212-X радиотехническая академия, 2004
ПРЕДИСЛОВИЕ
В состав пакета Control System системы MATLAB 6.x входит графический интерфейс пользователя SISO Tool Design, позволяющий проектировать линейные одномерные стационарные системы автоматического управления (SISO Systems) методами корневого годографа и частотных характеристик. К несомненному достоинству этого интерфейса надо отнести то, что он обеспечивает динамическую связь между параметрами проектируемой системы и ее характеристиками, отображаемыми в основном окне интерфейса, а также в окнах средств просмотра, открываемых с его помощью.
Данный интерфейс весьма полезен при изучении курсов, посвященных проблемам синтеза систем управления, т.к. позволяет студентам познать весь арсенал средств, применяемых при проектировании систем управления, описываемых моделями типа «вход-выход». В частности, изучить влияние расположения нулей и полюсов системы, формы частотных характеристик регулятора и предварительного фильтра на ее поведение как в переходном, так и в установившемся режимах.
В связи с тем, что структурная схема проектируемой системы, доступная в рамках рассматриваемого интерфейса, является фиксированной, пользователю при работе с ним не требуется глубоких знаний в области визуального моделирования динамических систем.
Все вышесказанное позволяет рекомендовать данный интерфейс как базовый инструмент для студентов–заочников при самостоятельном изучении основных положений и методов теории автоматического управления.
Авторы при написании учебного пособия преследовали цель облегчить студентам-заочникам усвоение основных приемов работы с интерфейсом и на конкретных примерах научить последних как его использовать для решения задач синтеза систем управления.
1. Основные сведения о средстве SISODesignTOOL
В состав ППП ControlSystemToolbox инструментальной системы MATLAB 6.x включено специальное средство проектирования линейных стационарных систем управления SISODesignTool (графический интерфейс пользователя для проектирования одномерных систем управления), называемое в дальнейшем сокращённо средство SISOTOOL.
В учебном пособии рассмотрены основные возможности и функции средства SISOTOOL.
2.ЗАПУСК СРЕДСТВА SISOTOOL
Чтобы запустить средство SISOTOOL:
а) вызовите MATLAB из
среды Windows, затем в меню View
активизируйте команду CommandWindow и
отмените все остальные команды.![]() Появляется
командное окно (CommandWindow)
системы MATLAB. Признаком того, что система MATLAB готова к восприятию и выполнению команд, является расположенный в
последней строке текстового поля этого окна знак приглашения >> (ломаные
двойные скобки);
Появляется
командное окно (CommandWindow)
системы MATLAB. Признаком того, что система MATLAB готова к восприятию и выполнению команд, является расположенный в
последней строке текстового поля этого окна знак приглашения >> (ломаные
двойные скобки);
 б) введите в командное окно системы MATLAB после знака приглашения
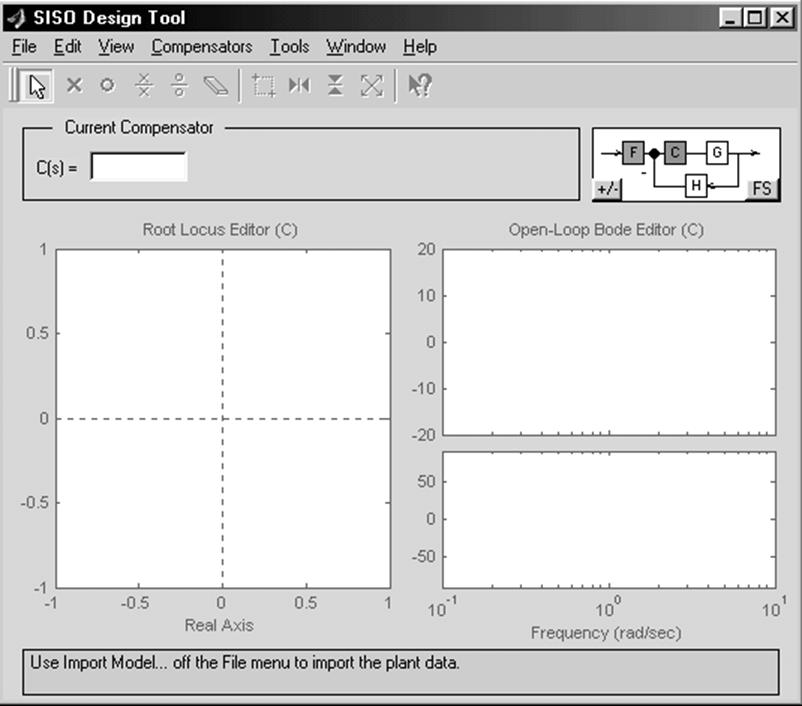
б) введите в командное окно системы MATLAB после знака приглашения ![]() команду sisotool. Появляется окно средства SISOTOOLс названием SISODesignTool (рис. 1), которое
содержит:
команду sisotool. Появляется окно средства SISOTOOLс названием SISODesignTool (рис. 1), которое
содержит:
· строку меню;
· две панели инструментов, разделенные вертикальной линией. Первая из них является панелью инструментов характеристик системы и включает в себя шесть кнопок с изображением стрелки, крестиков, нуликов и ластика, а вторая позволяет изменять масштаб изображения в графических окнах средства SISOTOOL;
· текстовое поле CurrentCompensator (текущий проектируемый регулятор) для информации о передаточной функции C(s) проектируемого в
Рис. 1
текущий момент регулятора;
· текстовое окно в поле CurrentCompensator, расположенное после выражения C(s)= и позволяющее получать информацию о текущем значении коэффициента усиления или приведенного коэффициента усиления регулятора;
· графическое поле, расположенное справа от поля CurrentCompensator и отображающее структурную схему проектируемой системы управления;
· поле RootLocusEditor(C) с изображением графического окна (окна корневого годографа), в котором осуществляется средством SISOTOOL построение корневого годографа;
· поле Open-LoopBodeEditor(C) с изображением двух графических окон, служащих для построения одна под другой логарифмических амплитудно-частотной и фазочастотной характеристик разомкнутого контура (системы);
· строку состояний, служащую для обеспечения информацией о ходе проектирования.
3. ЗАГРУЗКА (ИМПОРТ) МОДЕЛЕЙ
Средство SISOTOOL служит для решения задачи синтеза корректирующего устройства (регулятора) и предварительного фильтра (устройства прямой связи). Другими словами, это средство служит для выбора вида и параметров управляющего устройства исходя из требований, предъявляемых к качеству работы проектируемой системы управления в переходном и установившемся процессах. При таком виде синтеза предполагается, что предварительно получены (следовательно, известны) математические модели элементов неизменяемой части проектируемой системы и что выбран допустимый закон управления, определяющий её структурную схему. К подобным элементам в данном случае относятся объект управления и датчик.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.




