Таким образом, прежде чем начинать проектирование регулятора, надо ввести в средство SISOTOOL информацию о математических моделях элементов неизменяемой части проектируемой системы и допустимом законе управления. Следует отметить, что средство SISOTOOL оперирует со всеми видами моделей линейных стационарных элементов с одним входом и одним выходом (LTI-моделей), входящих в состав пакета прикладных программ ControlSystemToolbox (проектирование систем управления) инструментальной системы MATLAB и конструируемых с помощью команд этого пакета tf,zpk,ss [1,2], кроме элементов запаздывания. Детальное описание процедуры создания LTI-моделей в среде MATLAB по известным математическим моделям элементов, таким как передаточная функция; нули, полюсы и приведённый коэффициент усиления; уравнения в переменных состояния, приведено в [1,2], а также в приложении A настоящего учебного пособия.
Если созданы MATLAB’овские модели элементов неизменяемой части проектируемой системы, то для обеспечения нормальной работы средства их надо загрузить (импортировать) в это средство.
В зависимости от того, где хранятся или находятся такие модели, существуют три пути импортирования их в средствоSISOTOOL:
![]() загрузка моделей
из рабочего пространства (Workspace) MATLAB;
загрузка моделей
из рабочего пространства (Workspace) MATLAB;
![]() загрузка
моделей в виде MAT-файлов с диска;
загрузка
моделей в виде MAT-файлов с диска;
![]() загрузка
моделей как блоков SISOLTI из
открытой или сохранённой на диске блок-схемы Simulink[1].
загрузка
моделей как блоков SISOLTI из
открытой или сохранённой на диске блок-схемы Simulink[1].
Примечание. В начале нового сеанса работы с системой рабочее пространство является пустым. Команда Workspace (показать рабочее пространство), введенная в командное окно MATLAB, позволяет загрузить в рабочее пространство данные о ранее разработанных моделях, которые сохранены в виде так называемых MAT-файлов. В результате выбора этой команды появляется окно Workspace. После вызова с помощью команды Open из меню File нужного MAT-файла рабочее пространство дополняется содержащимися в файле моделями.
Есть ещё один путь ввода информации о математических моделях неизменяемой части системы, а именно: создание моделей типа tf, zpk, ssнепосредственно в текстовых окнах средства SISOTOOL (см. п. 3.4).
 Вы можете также использовать любую
комбинацию из этих путей, чтобы загрузить модели элементов (например, модель
датчика создать в текстовом окнесредстваSISOTOOL, а модель объекта импортировать из рабочего пространства MATLAB).
Вы можете также использовать любую
комбинацию из этих путей, чтобы загрузить модели элементов (например, модель
датчика создать в текстовом окнесредстваSISOTOOL, а модель объекта импортировать из рабочего пространства MATLAB).
Однако прежде чем импортировать модели в средство SISOTOOL из рабочего поля MATLAB, с диска или из блок-схемы Simulink , вы должны иметь хотя бы одну модель того или иного элемента, находящуюся в перечисленных объектах.
Рис. 2 Например, предположим, что вы хотите импортировать модель перевёрнутого маятника (см. приложение A) из рабочего пространства MATLAB, причём эта модель в виде файла pg.mat хранится на диске. Чтобы загрузить эту модель в рабочее пространство MATLAB, введите в командное окно MATLAB после приглашения >> команду loadpg. После выполнения этой команды модель перевёрнутого маятника в tf-форме будет загружена в рабочее пространство MATLAB, и вы сможете начать процесс проектирования регулятора для этого объекта с помощью средства SISOTOOL.
Заметим, что в приложении A даётся описание процедур, связанных с загрузкой моделей в рабочее пространство MATLABи на диск.
Независимо от выбранного пути ввода в средство SISOTOOLинформации о неизменяемой части проектируемой системы, прежде всего надо открыть диалоговое окно ImportSystemData(Импорт моделей линейных стационарных элементов для проектирования систем управления).
3.1. Чтобыоткрытьокно Import System Data:
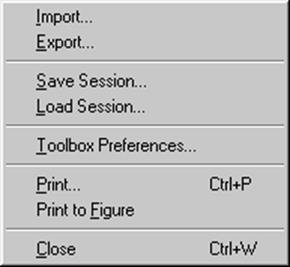
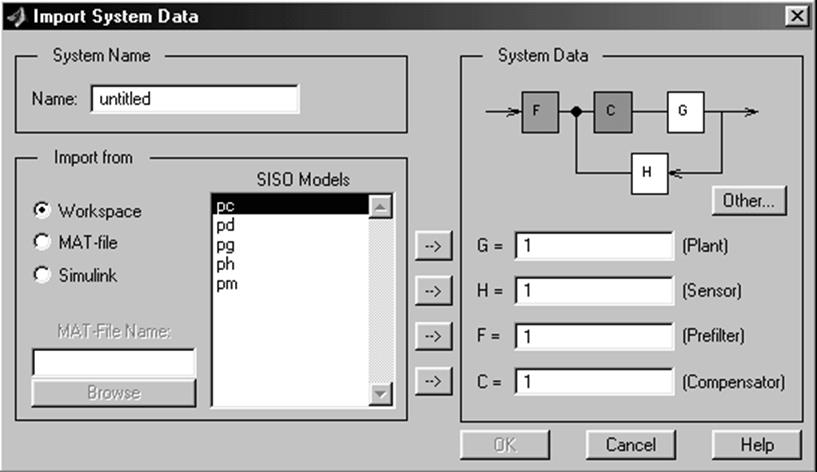
- выберите команду Import(Импорт моделей) из меню File окна SISO Design Tool средства SISOTOOL (рис. 2). Появляется окно ImportSystemData (рис.3), которое включает в себя три поля: SystemName (название системы), SystemData (данные о структуре и моделях проектируемой системы), ImportFrom(импортировать из…) и окно-список SISOModels (модели элементов с одним входом и одним выходом), содержащее перечень моделей элементов из рабочего пространства MATLAB, доступных для размещения в средстве SISOTOOL. В терминах процедуры проектирования, осуществляемой с помощью средства SISOTOOL, математические модели
![]() Рис. 3
Рис. 3
блоков Gи H являются заданными. Эти две модели вместе с выбранным законом управления, определяемым структурной схемой, образуют неизменяемую часть проектируемой системы.
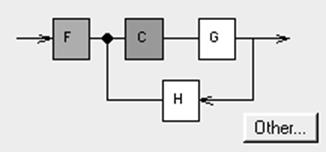
В поле SystemData по умолчанию изображена структурная схема проектируемой системы (рис. 4), где блок F-предварительный фильтр (устройство прямой связи), G-объект управления, H-датчик (сенсор), C-корректирующее устройство (регулятор). Как видим, в этой схеме регулятор охвачен обратной связью. Средство SISOTOOLпозволяет использовать иной закон управления, а именно закон управления с прямой и обратной связью, которому соответствует альтернативная по отношению к схеме на рис.4 структурная схема проектируемой системы (рис. 5), содержащая регулятор в обратной связи.
3.2. Чтобы использовать при проектировании системы закон управления с прямой и обратной связью:
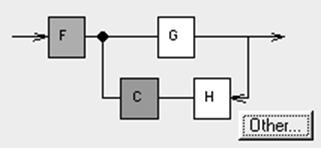
расположение регулятора на структурной схеме.
Поле ImportFrom включает в себя три селективные кнопки (переключатели). По умолчанию средство SISOTOOLвыбирает (активизирует) селективную кнопку Workspace, что означает использование импорта моделей из рабочего пространства MATLAB. При этом все имена доступных переменных (файлов) рабочего пространства представлены в окне-списке SISOModels (модели элементов с одним входом и одним выходом).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.