б) нажмите кнопку Yes (да) в появляющемся окне запросе Drawing SimulinkDiagrams для подтверждения вашего желания построить блок-схему, соответствующую данным о проектируемой системе (о неизменяемой части и регуляторе), или кнопку No (нет), если вы передумали строить такую блок-схему. В этом окне также содержится сообщение, что прежде чем создавать блок-схему, надо сохранить данные о моделях неизменяемой части и регуляторе в рабочем пространстве MATLAB. Кроме того, надпись в окнеDrawing SimulinkDiagrams предупреждает:эти модели будут сохранены под теми названиями, которые использовались в средстве SISOTOOL, и поэтому могут быть потеряны данные о прежде полученных моделях, хранящихся в рабочем пространстве MATLAB под такими же названиями. Если вы с учетом предупреждения нажали кнопку Yes, то открывается окно с блок-схемой спроектированной системы управления (рис. 57).
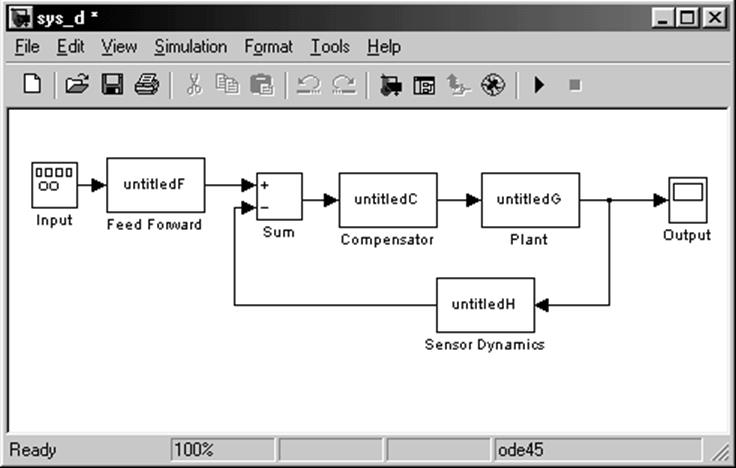
Рис. 57
Заметим, что блок-схема связана лишь с рабочим пространством MATLAB, а не со средством SISOTOOL. Поэтому при изменении модели регулятора в окне SISODesignToolвы должны эту модель экспортировать в рабочее пространство MATLABс целью отобразить такие изменения в блок-схеме Simulink.
15. ПРОЕКТИРОВАНИЕ ЦИФРОВЫХ СИСТЕМ УПРАВЛЕНИЯ
Средство SISOTOOLпозволяет осуществить два способа проектирования цифровых регуляторов. Первый из этих способов связан с переоборудованием непрерывной спроектированной системы, в том числе непрерывного (аналогового) регулятора, в цифровую систему, обладающую свойствами, близкими к свойствам своего непрерывного (аналогового) прототипа в некотором смысле, например в смысле совпадения весовых функций двух этих систем в дискретные моменты времени t=iT, где T- период дискретизации, i=0,1,2,….
Второй способ проектирования связан прежде всего с определением дискретной передаточной функции объекта управления и дискретизации всех непрерывных сигналов, циркулирующих в цифровой системе. После этого проектируется цифровой регулятор, обеспечивающий заданное качество замкнутой цифровой системе управления.
Остановимся вначале на описании второго способа, полагая для простоты равными единице передаточные функции предварительного фильтра и датчика. Заметим, что при этом операции, связанные с вводом модели объекта управления и выбора способа включения регулятора (последовательно с объектом или в обратную связь), ничем не отличаются от ранее рассмотренных операций применительно к проектированию непрерывных систем.
Чтобы найти модель дискретного фильтра, эквивалентного последовательному соединению фиксатора, объекта управления и ключа:
а) выберите команду Continuous/DiscreteConversions (Преобразование
элементов системы) из меню Tools окна SISO Design Tool. Появляется диалоговое окно с названием Continuous/DiscreteConversions (рис. 58);
б) выберите в качестве метода дискретизации Zero-orderHold [экстраполятор нулевого порядка (фиксатор)] для всех элементов системы. Название этого метода высвечивается во всех текстовых окнах панели ConversionMethod (метод дискретизации) по умолчанию;
в) введите в текстовое окно с названием Sampletime (sec) (период дискретизации в секундах) значение периода дискретизации, выбранного вами;
г) щёлкните кнопку OK.
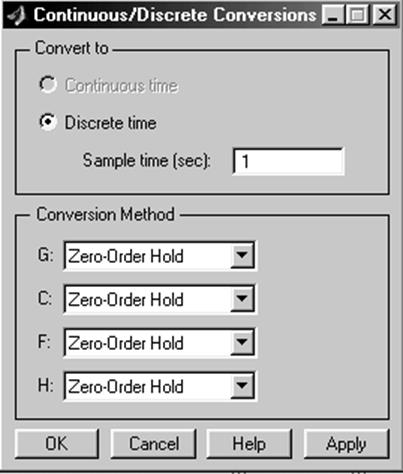
Рис. 58
Окно Continuous/DiscreteConversionsзакрывается, осуществляется дискретизация объекта управления и всей нескорректированной системы. Эта дискретизация приводит к следующим изменениям:
- комплексная плоскость s заменяется комплексной плоскостью z, и на ней изображаются нули/полюсы дискретного объекта управления в виде нулей/ крестиков, а также корневой годограф нескорректированной цифровой системы;
- в окнах Open-LoopBode (C) изображаются логарифмические частотные характеристики цифровой разомкнутой системы как функции псевдочастоты;
- все характеристики, отображаемые в окне LTIViewerforSISO DesignTool, изменяют свой вид.
Если ввести в диалоговое окно New Constraint значения желаемого времени переходного процесса, относительного коэффициента затухания и собственной частоты, то границы желаемого расположения полюсов проектируемой системы будут преобразованы применительно к комплексной плоскости z.
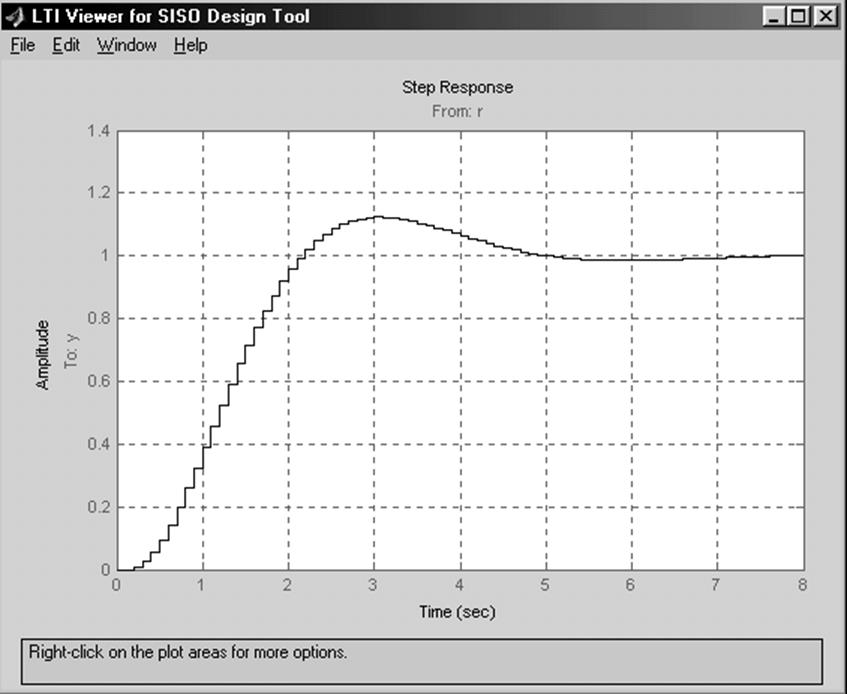
Рис. 59
Дальнейший процесс проектирования цифрового регулятора
аналогичен описанному ранее в разделе 10 процессу синтеза непрерывного регулятора.
При этом в области CurrentCompensator
окна SISO DesignTool отображается передаточная функция цифрового
регулятора как отношение многочленов от комплексной переменной ![]() , где
, где ![]() -
период дискретизации.
-
период дискретизации.
К сожалению, средство SISOTOOL не позволяет наблюдать реакцию непрерывного объекта, управляемого цифровым регулятором, т. к. при дискретизации непрерывный объект заменяется эквивалентным цифровым фильтром. Поэтому временные характеристики цифровой системы, отображаемые в окнах LTIViewerforSISO DesignTool, имеют ящичную структуру (рис. 59).
Первый способ проектирования систем управления, так же, как и второй, связан с открытием окна Continuous/DiscreteConversions, однако к помощи этого окна прибегают после окончания проектирования непрерывной системы, удовлетворяющей требованиям, предъявляемым к качеству работы цифровой системы. Выбор метода и периода дискретизации и последующее закрытие окна Continuous/DiscreteConversions приводят, так же, как и во втором способе, к изменению вида комплексной плоскости, корневого годографа, логарифмических частотных характеристик разомкнутой системы и всех характеристик, отражаемых в окнах LTIViewerforSISO DesignTool. В области CurrentCompensator окна SISO DesignTool теперь высвечивается передаточная функция цифрового регулятора как результат переоборудования непрерывного регулятора, соответствующего исходной непрерывной системе-прототипу.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.