Рис. 24
вертикальная линия (рис. 24), представляющая собой границу желаемого расположения полюсов проектируемой системы с точки зрения быстродействия;
г) снова выполните п. 7.1, “а” и выберите с помощью раскрывающегося списка с названием ConstraintType (вид ограничения) команду Percent
Overshoot(перерегулирование в %). При этом в поле Constraint Parameters
(граничное значение параметра) изменяется название текстового окна на PercentOvershoot<и в этом окне высвечивается по умолчанию цифра 4.33.
Итак, по умолчанию граничное значение
перерегулирования предлагается установить равным 4,33 %. Если вас устраивает
эта величина, нажмите кнопку OK. Если вас не устраивает эта величина, то введите в
текстовое окно PercentOvershoot<
желаемое граничное значение
перерегулирования и нажмите кнопку OK. На плоскости корневого
годографа появляются два луча, представляющие собой границу желаемого
расположения полюсов проектируемой системы с точки зрения колебательности. Эти
два луча можно построить, используя желаемое значение относительного
коэффициента затухания ![]() , соответствующего
желаемому значению перерегулирования
, соответствующего
желаемому значению перерегулирования ![]() . Для этого нужно снова
выполнить п. “а” и выбрать с помощью раскрывающегося списка с названием ConstraintType команду DampingRatio (относительный коэффициент
затухания). При этом в поле ConstraintParametersизменяется
название текстового окна на DampingRatio<и в таком окне
высвечивается по умолчанию цифра 0.707, соответствующая перерегулированию 4.33
%. Измените эту цифру на цифру, определяемую желаемым значением относительного
коэффициента демпфирования, или оставьте без изменений, затем нажмите кнопку OK.
. Для этого нужно снова
выполнить п. “а” и выбрать с помощью раскрывающегося списка с названием ConstraintType команду DampingRatio (относительный коэффициент
затухания). При этом в поле ConstraintParametersизменяется
название текстового окна на DampingRatio<и в таком окне
высвечивается по умолчанию цифра 0.707, соответствующая перерегулированию 4.33
%. Измените эту цифру на цифру, определяемую желаемым значением относительного
коэффициента демпфирования, или оставьте без изменений, затем нажмите кнопку OK.
Точки пересечения вертикальной линии, соответствующей ![]() , и лучей,
проведённых под углами
, и лучей,
проведённых под углами ![]() , определяют точки
расположения желаемых доминирующих полюсов проектируемой системы (рис. 24).
, определяют точки
расположения желаемых доминирующих полюсов проектируемой системы (рис. 24).
Точки расположения этих полюсов можно найти, используя ещё одну границу области расположения полюсов, которая повышает требования к значениям полюсов проектируемой системы.
7.2.
Чтобы построить границы желаемой области расположения полюсов проектируемой
системы, определяемые значениями ![]() и
и![]() /
/![]() :
:
а) постройте, как описано в п. 7.1,“г”, границы
желаемой области расположения полюсов проектируемой системы исходя из
желаемого значения перерегулирования, введя в текстовое окно DampingRatio= (желаемый
относительный коэффициент равен) диалогового окна NewConstraint желаемые
значения относительного коэффициента затухания ![]() ;
;
б) выполните п. 7.1, “а” и выберите с помощью раскрывающегося списка с названием ConstraintType (вид ограничения) команду NaturalFrequency (собственная частота). При этом в поле ConstraintParameters(граничное значение параметра) изменяется название текстового окна на NaturalFrequency: (желаемая собственная частота) и это окно разбивается на два подокна. В первом подокне высвечивается по умолчанию atmost(по большей части), а во втором подокне - цифра 1. Итак, по умолчанию граничное
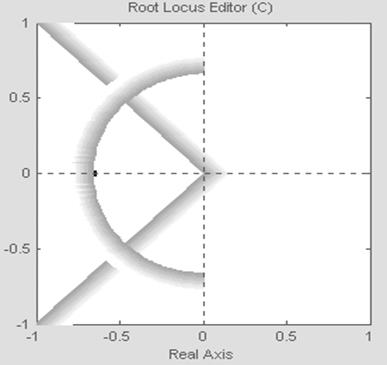
Рис. 25
максимальное значение собственной частоты предлагается установить равным 1 рад/с. Если вас устраивает эта величина, нажмите кнопку OK. Если вас не
устраивает эта величина, то введите вместо единицы желаемое максимальное значение собственной частоты и нажмите кнопку OK;
в)
нажмите на кнопку OK . Появляется окно средства SISOTOOL с изображением двух лучей, соответствующих желаемому значению
относительного коэффициента затухания ![]() ,
,![]() и полуокружности с радиусом,
соответствующим максимальному желаемому значению собственной частоты
и полуокружности с радиусом,
соответствующим максимальному желаемому значению собственной частоты ![]() (рис. 25).
(рис. 25).
Заметим, что с помощью команды Gridиз меню
правой клавиши мыши (рис. 12) можно в графическом окне корневого годографа
построить множество линий равных значений относительного коэффициента
затухания ![]() и собственной частоты
и собственной частоты ![]() .
.
8. ВЫБОР ГРАНИЦ ЖЕЛАЕМОЙ ОБЛАСТИ РАСПОЛОЖЕНИЯ
Проектирование управляющего устройства с помощью логарифмических частотных характеристик в средстве SISOTOOL удобно проводить, построив предварительно границы желаемой области расположения логарифмической амплитудно-частотной характеристики разомкнутой проектируемой системы.
Различают две предельные границы такой желаемой области: нижнюю низкочастотную и верхнюю высокочастотную (рис. 26). Первая из них строится в соответствии с требованиями, предъявляемыми к точности работы системы в установившемся режиме, а вторая (граница робастности) - исходя из требований, предъявляемых к помехоустойчивости и чувствительности системы к неопределенности используемой при проектировании модели объекта управления.
Заметим, что введение границ лишь для одной из логарифмических частотных характеристик разомкнутой системы, а именно для амплитудно-частотной характеристики, обусловлено предположением о принадлежности проектируемой системы к классу минимально-фазовых систем. Остановимся на построении упомянутых границ применительно к структуре системы с управляющим устройством (регулятором), включенным перед объектом управления (рис. 4), полагая передаточные функции предварительного фильтра и датчика равными единице.
Формирование границы точности работы системы в установившемся режиме связано с
заданной точностью воспроизведения задающего воздействия. В целом ряде случаев
в задании на проектирование системы в качестве задающего воздействия фигурирует
низкочастотный гармонический сигнал, частота которого может принимать любые значения
в диапазоне от нуля до верхнего предельного значения ![]() и
амплитуда которого не превышает величины
и
амплитуда которого не превышает величины ![]() .
Кроме верхних предельных значений частоты и амплитуды, в задании указывается
величина допустимой установившейся ошибки воспроизведения
.
Кроме верхних предельных значений частоты и амплитуды, в задании указывается
величина допустимой установившейся ошибки воспроизведения ![]() такого сигнала. При этом условие
требуемой точности воспроизведения
данного гармонического сигнала применительно к
такого сигнала. При этом условие
требуемой точности воспроизведения
данного гармонического сигнала применительно к
логарифмической
амплитудно-частотной характеристике разомкнутой системы ![]() можно записать в виде [3]:
можно записать в виде [3]:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.