![]()
![]() .
.
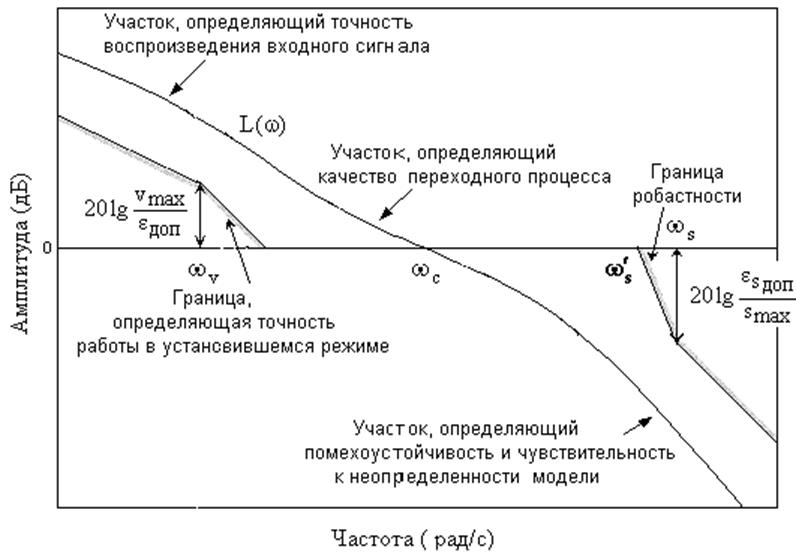
Рис. 26
Отсюда нетрудно найти уравнение нижней предельной границы точности работы системы в установившемся режиме
![]()
![]() .
.
Наряду с заданной точностью воспроизведения гармонического воздействия
проектируемая система должна, как правило, безошибочно воспроизводить в
установившемся режиме постоянное задающее воздействие, т.е. должна обладать
астатическими свойствами. Следовательно, низкочастотный участок
логарифмической амплитудно-частотной характеристики проектируемой разомкнутой
системы должен иметь наклон, по меньшей мере равный –20 дБ/дек. Если желаемый
порядок астатизма равен единице, то граница точности работы в установившемся
режиме в диапазоне частот гармонического задающего воздействия обязана иметь
вид луча (рис. 26), выходящего из точки с координатами ![]() ,
,![]() и имеющего наклон –20 дБ/дек.
Разумеется, проектируемая замкнутая система будет обеспечивать требуемую
точность воспроизведения задающего воздействия, когда логарифмическая
амплитудно-частотная характеристика разомкнутой системы в диапазоне частот
и имеющего наклон –20 дБ/дек.
Разумеется, проектируемая замкнутая система будет обеспечивать требуемую
точность воспроизведения задающего воздействия, когда логарифмическая
амплитудно-частотная характеристика разомкнутой системы в диапазоне частот ![]() будет располагаться не ниже такой
границы точности.
будет располагаться не ниже такой
границы точности.
Вторая
граница желаемого расположения логарифмической амплитудно-частотной
характеристики разомкнутой системы (граница робастности) формируется в
соответствии с требованиями помехоустойчивости. Это требование обусловлено
наличием высокочастотного шума датчика (шума измерений), возникающего в
процессе измерения управляемой величины (рис. 19). Пусть шум датчика занимает
спектр частот, лежащий выше нижней предельной частоты ![]() ,
заметно превышающей верхнюю предельную частоту
,
заметно превышающей верхнюю предельную частоту ![]() спектра
задающего воздействия. Предположим, что известны максимальное значение каждой
гармонической составляющей
спектра
задающего воздействия. Предположим, что известны максимальное значение каждой
гармонической составляющей ![]() шума измерения и допустимая величина установившейся
ошибки
шума измерения и допустимая величина установившейся
ошибки ![]() по шуму измерения. Тогда условие
малого влияния шума измерения на управляемую величину в установившемся режиме
можно записать применительно к логарифмической амплитудно-частотной
характеристике разомкнутой системы в виде
по шуму измерения. Тогда условие
малого влияния шума измерения на управляемую величину в установившемся режиме
можно записать применительно к логарифмической амплитудно-частотной
характеристике разомкнутой системы в виде
![]()
![]() .
.
Данное соотношение получено с учетом того, что при малых значениях амплитудно-частотной характеристики разомкнутой системы амплитудно-частотная характеристика замкнутой системы принимает значения, почти не отличающиеся от значений первой из упомянутых характеристик.
Итак, верхняя предельно допустимая граница робастности, называемая также границей помехоустойчивости, определяется выражением
![]()
![]() .
.
Для того чтобы проектируемая система подавляла в достаточной степени шум измерения, ее логарифмическая амплитудно-частотная характеристика должна проходить не ниже границы помехоустойчивости на частотах шума измерения.
Заметим, чем меньшие значения принимает логарифмическая амплитудно-частотная характеристика проектируемой системы в области высоких частот, тем меньшее влияние на управляемую величину оказывает неопределенность модели объекта управления в этой области и тем выше робастность (грубость) системы. Отсюда второе название границы - граница робастности. Если проблема робастности превалирует над задачей помехоустойчивости, то граница робастности строится исходя из несколько преобразованного критерия робастной устойчивости системы [4]:
![]() ,
,
где логарифмическая частотная характеристика
![]()
отражает
отношение номинальной амплитудно-частотной характеристики ![]() объекта управления к аддитивной
неопределенности
объекта управления к аддитивной
неопределенности ![]() в области высоких частот. В этом случае граница
робастности определяется как
в области высоких частот. В этом случае граница
робастности определяется как ![]() . Здесь частота
. Здесь частота ![]() является частотой, при которой
логарифмическая частотная характеристика
является частотой, при которой
логарифмическая частотная характеристика ![]() пересекает
ось частот.
пересекает
ось частот.
Пример.
Пусть возмущенная передаточная функция объекта управления![]() , учитывающая неопределенность
динамики объекта на высоких частотах, имеет вид
, учитывающая неопределенность
динамики объекта на высоких частотах, имеет вид
![]() ,
,
где
![]() - номинальная
передаточная функция объекта управления.
- номинальная
передаточная функция объекта управления.
При этом передаточная функция аддитивной неопределенности определяется выражением
![]() .
.
Отсюда
асимптотическая логарифмическая частотная характеристика, определяемая как ![]() и построенная по отношению
передаточных функций
и построенная по отношению
передаточных функций ![]() , имеет вид, представленный
на рис. 27.
, имеет вид, представленный
на рис. 27.
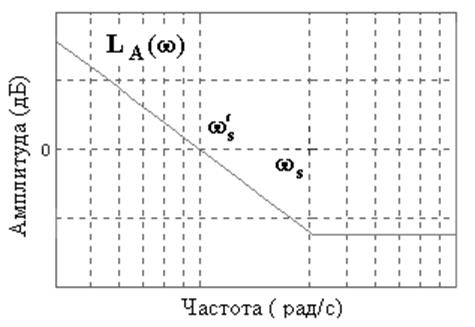
Рис. 27
Следует
сказать, что хорошая замкнутая система управления должна иметь достаточно
широкую полосу пропускания и малую колебательность. Полоса пропускания
замкнутой системы управления зависит от частоты среза ![]() ,
при которой логарифмическая амплитудно-частотная характеристика разомкнутой
системы пересекает ось частот на уровне 0 дБ (рис. 26). Установлено, что для
обеспечения малой колебательности (малого перерегулирования) наклон
среднечастотного участка логарифмической амплитудно-частотной характеристики
разомкнутой системы, которому принадлежит частота среза, должен быть равен –20
дБ/дек и его протяженность должна составлять примерно одну декаду.
,
при которой логарифмическая амплитудно-частотная характеристика разомкнутой
системы пересекает ось частот на уровне 0 дБ (рис. 26). Установлено, что для
обеспечения малой колебательности (малого перерегулирования) наклон
среднечастотного участка логарифмической амплитудно-частотной характеристики
разомкнутой системы, которому принадлежит частота среза, должен быть равен –20
дБ/дек и его протяженность должна составлять примерно одну декаду.
Рассмотрим методику построения границ точности и робастности в графическом окне Open-LoopBodeEditor(C) с изображением логарифмической амплитудно-частотной характеристики разомкнутой системы (рис. 28). Средство SISOTOOL позволяет строить эти границы в виде ломаных линий.
Чтобы построить границу точности:
а) вызовите меню правой клавиши мыши в графическом окне Open-LoopBodeEditor(C) и выберите команду New (новая граница) из подменю Design Constraints(построить границы желаемой области расположения логарифмической амплитудно-частотной характеристики разомкнутой проектируемой системы). Появляется диалоговое окно NewConstraint (выбираемые параметры новой границы) (рис. 29), в котором по умолчанию в текстовом окне с названием ConstraintType (вид ограничения) высвечивается UpperGainLimit (верхняя предельная граница);
б) установите в текстовом окне с названием ConstraintTypeс помощью раскрывающегося списка режим LowerGainLimit(нижняяпредельная
граница);
в) осуществите в поле ConstraintParameters следующие операции:
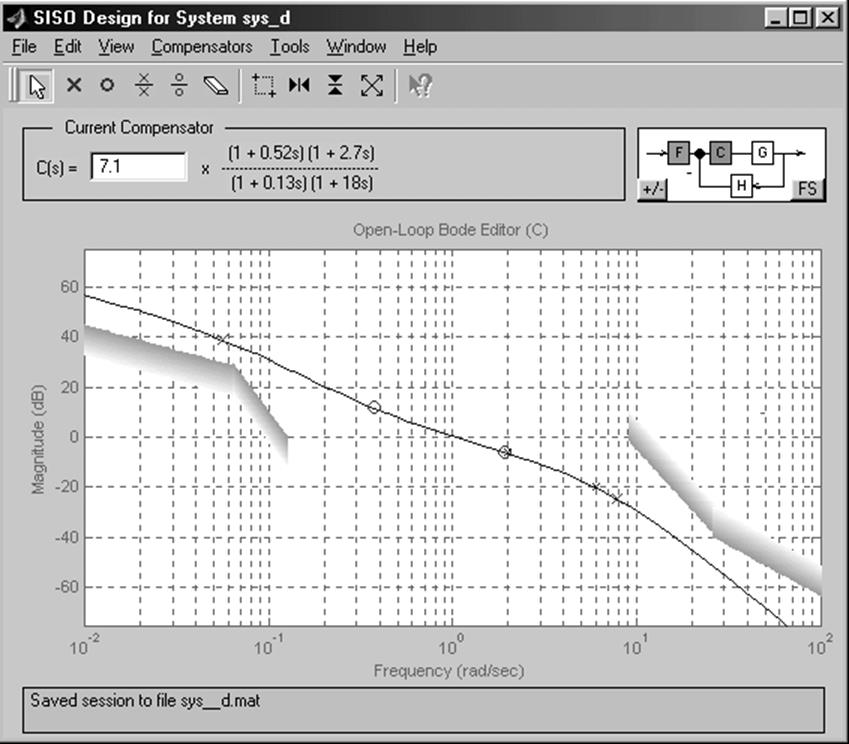
Рис. 28
·
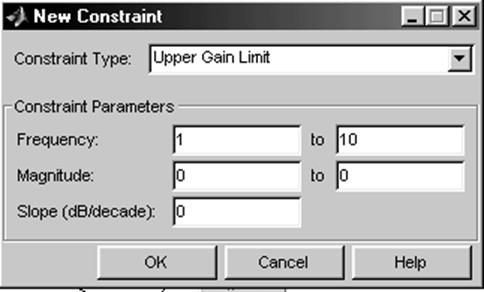 если отсутствует требование
астатизма, то введите: в текстовые подокна с общим названием Frequency соответственно нижнее и верхнее желаемые значения частоты для
первого отрезка границы точности, например значения 0.001 и 0.065, причем
верхнее значение частоты должно быть равно
если отсутствует требование
астатизма, то введите: в текстовые подокна с общим названием Frequency соответственно нижнее и верхнее желаемые значения частоты для
первого отрезка границы точности, например значения 0.001 и 0.065, причем
верхнее значение частоты должно быть равно
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.