В результате решения задачи регулирования определяется передаточная функция замкнутого контура, связывающая управляемую величину и выходной сигнал предварительного фильтра. Затем можно перейти к решению задачи слежения, полагая отсутствующими такие факторы, как возмущающие воздействия, шум измерения управляемой величины, неопределенность и неточность динамики объекта управления. При найденной передаточной функции замкнутого контура ради обеспечения заданной точности воспроизведения задающего воздействия в установившемся режиме используют следующие подходы:
·
выбирают передаточную функцию
предварительного фильтра из условия селективной абсолютной инвариантности
проектируемой системы к задающему воздействию ![]() с
известным изображением
с
известным изображением ![]() ,
например в виде
,
например в виде
![]() .
.
Здесь![]() - передаточная
функция замкнутого контура,
- передаточная
функция замкнутого контура, ![]() -передаточная функция, обеспечивающая устойчивость предварительного
фильтра;
-передаточная функция, обеспечивающая устойчивость предварительного
фильтра;
· используют в качестве предварительного фильтра регулятор с опережением по фазе, описываемый передаточной функцией
![]()
с
целью уменьшить коэффициент ошибки по скорости в системе с первым порядком
астатизма. При этом постоянные времени ![]() и
и
![]() выбирают
достаточно большими, чтобы введение предварительного фильтра не повлияло на
качество переходного процесса.
выбирают
достаточно большими, чтобы введение предварительного фильтра не повлияло на
качество переходного процесса.
В тех случаях, когда реакция замкнутого контура на
ступенчатое воздействие, приложенное со стороны предварительного фильтра,
благодаря влиянию нулей регулятора или объекта управления является чрезмерно
колебательной (имеет место недопустимое перерегулирование), то самый простой
подход, позволяющий повысить качество переходного процесса (уменьшить
перерегулирование), вызванного задающим воздействием, - компенсировать эти нули с помощью предварительного фильтра. Так, при
регуляторе с опережением по фазе передаточная функция замкнутого контура
содержит нуль ![]() , который часто
обусловливает большое перерегулирование. Выбирая передаточную функцию
предварительного фильтра как
, который часто
обусловливает большое перерегулирование. Выбирая передаточную функцию
предварительного фильтра как ![]() , можно
скомпенсировать этот нуль и тем самым понизить величину перерегулирования,
следовательно, уменьшить ошибку воспроизведения задающего воздействия в
переходном режиме.
, можно
скомпенсировать этот нуль и тем самым понизить величину перерегулирования,
следовательно, уменьшить ошибку воспроизведения задающего воздействия в
переходном режиме.
Еще одной причиной включения предварительного фильтра
является высокочастотный шум измерения задающего воздействия, другими словами,
шум датчиков, служащих для измерения задающего воздействия. С целью подавления
такого шума используют фильтр нижних частот, вводя в знаменатель передаточной
функции предварительного фильтра сомножитель вида ![]() .
.
Итак, предварительный фильтр играет большую роль при проектировании систем управления, т. к. позволяет:
· ослабить требования к запасам устойчивости или коэффициенту усиления разомкнутой системы (разомкнутого контура);
· повысить точность воспроизведения задающего воздействия в установившемся режиме;
· уменьшить величину перерегулирования при отработке задающего воздействия;
· подавить высокочастотный шум измерения задающего воздействия.
Если вы не импортировали модель предварительного фильтра, то его передаточная функция по умолчанию равна единице. Вы можете с помощью средства SISOTOOL ввести нули и полюсы предварительного фильтра, а если необходимо, и удалить их, а также выбрать его коэффициент усиления, используя те же самые способы, что применяются при синтезе регулятора, а именно:
1) используя кнопки со стрелками панели инструментов (рис. 32), расположенные в окне SISODesignTool;
2) применяя команду F(изменение свойств предварительного фильтра) из подменюEdit, входящего в менюCompensators того же окна SISO Design Tool;
3) применяя меню правой клавиши мыши, которое можно вызвать в графическом окне PrefilterBodeEditor (F) с изображением логарифмических частотных характеристик предварительного фильтра (рис. 41), открываемом в окне SISODesignToolс помощью команды PrefilterBodeиз меню View.
Кроме того, с этой целью можно применить команды подменю Prefilter Bode из меню Edit.
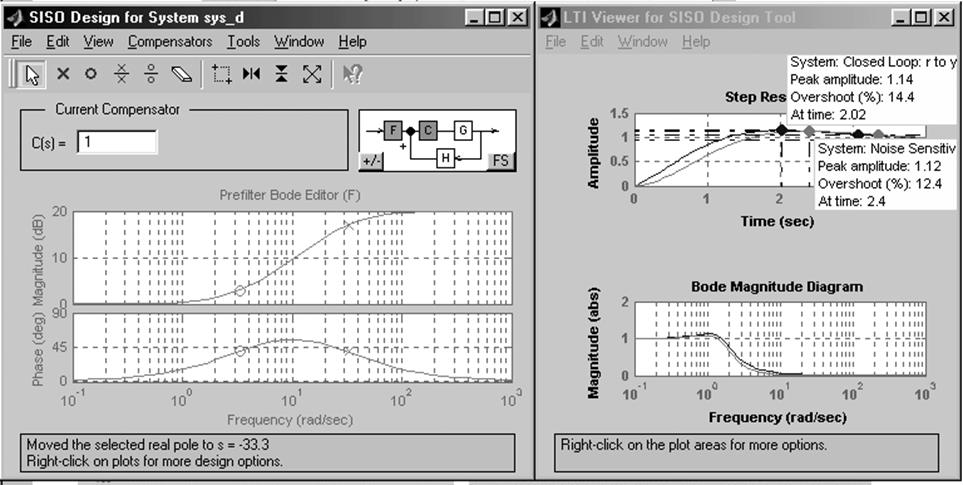
Рис. 41
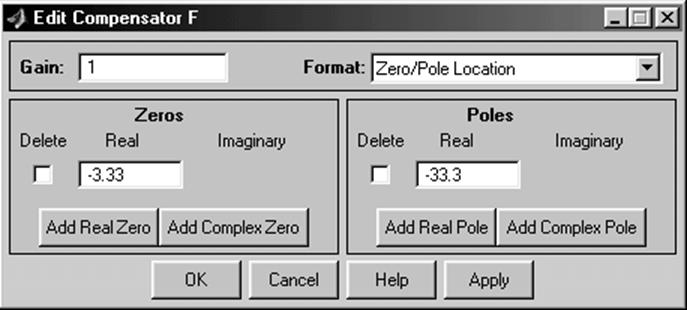 В качестве примера рассмотрим построение устройства с
опережением по фазе, которое имеет один нуль –3.33, один полюс –33.33,
коэффициент усиления, равный единице, и используется как предварительный
фильтр. С этой целью выполните команду F из подменю
Edit, входящего
в менюCompensators
окна SISODesignTool, введите в появляющееся диалоговое
В качестве примера рассмотрим построение устройства с
опережением по фазе, которое имеет один нуль –3.33, один полюс –33.33,
коэффициент усиления, равный единице, и используется как предварительный
фильтр. С этой целью выполните команду F из подменю
Edit, входящего
в менюCompensators
окна SISODesignTool, введите в появляющееся диалоговое
Рис. 42
окноEdit CompensatorF численные значения параметров создаваемого устройства (рис. 42) и нажмите кнопку OK.
На рис. 41 показаны нуль и полюс, введенные таким способом в окно с изображением логарифмических частотных характеристик предварительного фильтра, а также справа окно просмотра, в котором отображаются переходные и амплитудно-частотные характеристики замкнутой системы с предварительным фильтром и без него. Из этих характеристик видно, что включение в систему в качестве предварительного фильтра устройства с опережением по фазе оказывает малое влияние на качество переходного процесса. Однако анализ реакции системы на задающее воздействие, изменяющееся с постоянной скоростью, равной единице, свидетельствует об уменьшении установившейся ошибки по скорости с 0,7 до 0,43 при добавлении в систему созданного предварительного фильтра (рис. 43).
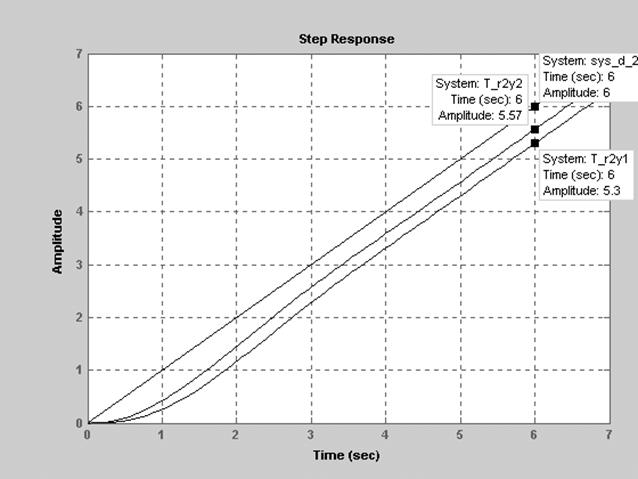
Рис. 43
Следует
отметить, что, вводя в предварительный фильтр нули и полюсы изображения
задающего воздействия, а также нулевой полюс, можно внутри этого фильтра
создать генератор, обеспечивающий требуемый закон изменения задающего
воздействия. При этом команда Closed-LoopStep подменю
Loop Responses из меню Tools позволит наблюдать реакцию замкнутой системы на это воздействие.
Именно таким путем были построены графики изменения управляемой величины при
линейно нарастающем задающем воздействии (рис.43). В данном случае изображение
этого воздействия содержит два нулевых полюса, один из которых компенсируется
упомянутым нулевым нулем. Поэтому в предварительный фильтр достаточно
дополнительно ввести один нулевой полюс, чтобы получить с помощью команды Closed-LoopStep реакцию
на сигнал, изменяющийся с постоянной скоростью. Разумеется, при генерации
задающего воздействия нужно учитывать постоянный коэффициент изображения этого
воздействия. Так, при генерации синусоидального сигнала с амплитудой, равной 5,
и частотой, равной 0.3 рад/с, нужно не только ввести в предварительный фильтр
нулевой нуль и полюсы ![]() изображения
синусоидального сигнала, но и изменить коэффициент усиления предварительного
фильтра в 1,5 раза.
изображения
синусоидального сигнала, но и изменить коэффициент усиления предварительного
фильтра в 1,5 раза.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.