Вместе с тем отметим, что рассмотренные способы настройки систем не распространяются непосредственно на объекты, содержащие слабо демпфированные колебательные звенья.
1.2.2. Оптимизация унифицированной системы управления электроприводом при жесткой связи двигателя и механизма.
В тех случаях, когда систему
электропривода можно рассмотреть как жесткую, влияние механизма на работу
электропривода сказывается лишь в увеличении суммарного момента инерции,
который складывается из момента инерции ![]() электродвигателя
Д с редуктором Р и приведенного к двигателю момента инерции
электродвигателя
Д с редуктором Р и приведенного к двигателю момента инерции ![]() исполнительного механизма ИМ:
исполнительного механизма ИМ: ![]() .
.
Приложение момента нагрузки к механизму после приведения его значения к валу двигателя совершено идентично приложению момента нагрузки непосредственно к валу двигателя.
С учетом этих условий рассмотрим жесткую унифицированную систему автоматического управления электроприводами на примере системы регулирования скорости с подчиненным контуром тока. Современные системы строятся на интегральных усилителях с высоким собственным коэффициентом усиления.
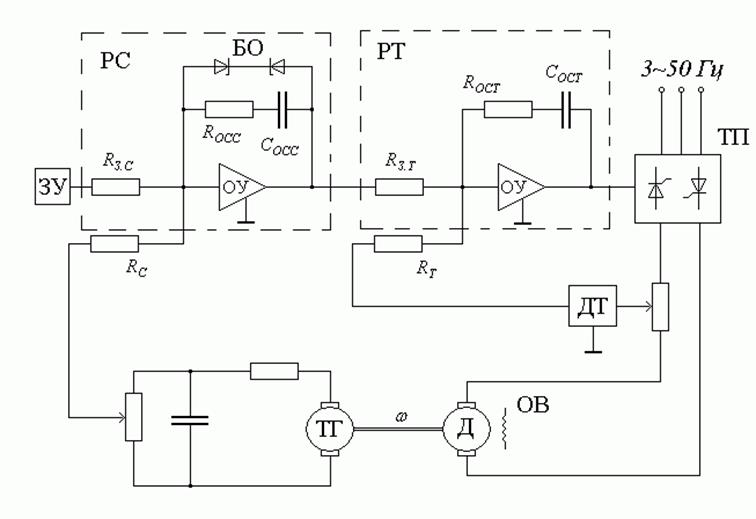
Рис. 1.9 Унифицированная схема регулирования скорости с подчиненным контуром тока.
Работа системы (рис. 1.9.)
становится ясной из рассмотрения режима пуска. Если не предусматривается
использование устройства задания интенсивности, пуск осуществляется путем
подачи на вход задания скорости ![]() регулятора скорости
РС напряжения управления
регулятора скорости
РС напряжения управления ![]() . Под действием
большого входного сигнала на выходе регулятора скорости устанавливается
напряжение ограничения, значение которого определяется настройкой блока
ограничения БО, коэффициент усиления регулятора скорости становится
равным нулю, т.е. контур регулирования скорости размыкается. Следующий этап
пуска происходит при постоянном напряжении ограничения
на выходе регулятора скорости
. Под действием
большого входного сигнала на выходе регулятора скорости устанавливается
напряжение ограничения, значение которого определяется настройкой блока
ограничения БО, коэффициент усиления регулятора скорости становится
равным нулю, т.е. контур регулирования скорости размыкается. Следующий этап
пуска происходит при постоянном напряжении ограничения
на выходе регулятора скорости![]() . Выходное
напряжение регулятора скорости является эталонным напряжением для контура
регулирования тока (контур тока "подчинен" контуру скорости). Поэтому
регулятор тока РТ поддерживает постоянство тока якоря
. Выходное
напряжение регулятора скорости является эталонным напряжением для контура
регулирования тока (контур тока "подчинен" контуру скорости). Поэтому
регулятор тока РТ поддерживает постоянство тока якоря ![]() , воздействуя на систему управления
тиристорного преобразователя ТП. При постоянстве момента нагрузки это соответствует
разгону двигателя с постоянным ускорением. В этот период пуска для входных
цепей регулятора тока можно записать:
, воздействуя на систему управления
тиристорного преобразователя ТП. При постоянстве момента нагрузки это соответствует
разгону двигателя с постоянным ускорением. В этот период пуска для входных
цепей регулятора тока можно записать:
 , где
, где ![]() ;
; ![]() - максимально допустимый ток при пуске
(и в переходных режимах);
- максимально допустимый ток при пуске
(и в переходных режимах); ![]() - коэффициент передачи
датчика тока, В/А;
- коэффициент передачи
датчика тока, В/А; ![]() и
и ![]() - входные сопротивления регулятора
тока соответственно по каналу задания и по каналу обратной связи по току.
- входные сопротивления регулятора
тока соответственно по каналу задания и по каналу обратной связи по току.
По мере разгона двигателя напряжение
тахогенератора (датчика скорости) ДС растет, когда оно достигнет
значения, близкого к определяемому равенством  ,
регулятор скорости выйдет из ограничения; напряжение на его выходе начнет
уменьшаться, давая сигнал на уменьшение тока якоря. Установившееся положение, к
которому придет система, будет характеризоваться тем, что при данной нагрузке
двигателя результирующий выходной сигнал регулятора скорости обеспечит на его
выходе такое напряжение
,
регулятор скорости выйдет из ограничения; напряжение на его выходе начнет
уменьшаться, давая сигнал на уменьшение тока якоря. Установившееся положение, к
которому придет система, будет характеризоваться тем, что при данной нагрузке
двигателя результирующий выходной сигнал регулятора скорости обеспечит на его
выходе такое напряжение ![]() , которое
соответствует данному току нагрузки.
, которое
соответствует данному току нагрузки.
Система во всех режимах будет
ограничивать ток якоря значением ![]() , которое может быть
превышено только в первый момент ограничения регулятора скорости в результате
переходного процесса в контуре тока. Таким образом, первая задача контура тока
состоит в ограничении значения тока якоря, что особенно важно при применении
тиристорного преобразователя.
, которое может быть
превышено только в первый момент ограничения регулятора скорости в результате
переходного процесса в контуре тока. Таким образом, первая задача контура тока
состоит в ограничении значения тока якоря, что особенно важно при применении
тиристорного преобразователя.
Вторая задача контура тока сводится к быстрой отработке возмущающего воздействия в виде изменения напряжения сети. Если напряжение сети изменится скачком, то также скачком изменится в первый момент и напряжение на выходе тиристорного преобразователя. Это приведет к изменению якорного тока. Регулятор тока будет восстанавливать его в результате изменения угла регулирования тиристоров. Если быстродействие контура тока велико, а электромеханическая постоянная времени привода значительна, то отклонение скорости в переходном процессе будет малым.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.