2.“Естественная” синхронизация неодинаковых неуравновешенных роторов в трех вариантах указанных выше.
3.Изменение сдвига фазы в синхронном режиме вращения при самосинхронизации в трех вариантах (см. выше). Пределы изменения разности фаз ±30о.
4.Управление пуском неуравновешенного ротора путем его раскачивания.
5.Эффект Зоммерфельда при присоединении к вибрационному органу дополнительного груза на пружине в следующих вариантах:
- “застревание” при разгоне;
- резкое увеличение амплитуды колебаний при остановке и свободно колеблющемся грузе.
6.Эффект динамического гашения колебаний.
7.Удержание маятника (дебаланса) в верхнем неустойчивом положении при использовании соответствующего управления.
8.Различные технологические эффекты (при использовании дополнительных устройств, устанавливаемых на стенде):
- вибрационное псевдосжижение сыпучего материала, циркуляция материала в сосуде;
- всплывание “тяжелого” тела в более легкой среде;
- “насосный” эффект, создаваемый вибрирующей в жидкости воронкой;
- расслоение сыпучего материала по крупности;
- расслоение сыпучего материала по плотности;
- вибротранспортирование тел и сыпучих материалов в различных вариантах (вибропоток, виброподъемник) и т.д.
1.1.2. Описание системы управления вибрационным стендом с учетом системы электроприводов
Рассматриваемый в работе вибрационный стенд СВ-2 включает собственно вибрационную установку с упруго-присоединенным грузом и систему управления этой установкой. Структурно-функциональная схема стенда представлена на рис.1.5.
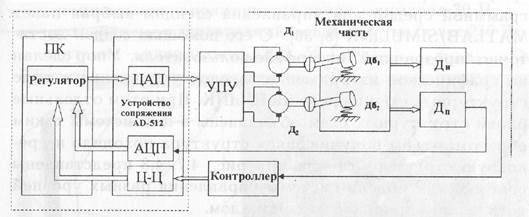
Рис.1.5
Обозначения на рисунке: ПК – персональный компьютер; ЦАП – цифроаналоговый преобразователь; АЦП – аналого-цифровой преобразователь; Ц-Ц – канал цифра-цифра; УПУ – усилительно-преобразовательное устройство; Д1, Д2 – электродвигатели; Дб1, Дб2 – роторы со смещенным центром тяжести (дебалансы); Ди, Дп – датчики импульсов и перемещения.
В системе управления можно выделить: электропривода неуравновешенных роторов, электронный блок усилителя-преобразователя, систему датчиков со специальным контроллером для снятия и обработки сигналов, персональный компьютер с устройствами сопряжения с физической аппаратурой. Все устройства составляют единую замкнутую систему, в которой электрические и механические процессы неразрывно связаны между собой, что и дает основание называть стенд мехатронным.
Конструктивно устройство сопряжения (плата AD-512 фирмы «Humusoft») помещено внутрь персонального компьютера (ПК). Оно имеет 16-канальный 12-битный аналого-цифровой преобразователь с максимальной частотой квантования 100кГц, восемь цифровых каналов ввода/вывода и 12-битный цифроаналоговый преобразователь, позволяющий формировать сигнал задания для электронного усилителя разнообразной формы, частоты и амплитуды из диапазона ±10В. Время, затрачиваемое на преобразование цифрового сигнала в аналоговый, не превышает 30мкс. Для связи устройства сопряжения с программой MATLAB 5.2 установлен Real Time Toolbox-2.5 с драйвером для AD-512«Humusoft». Архитектура ПК выбрана следующей: Pentium-166MMX/32Mb/3Gb. Такая мощность компьютера достаточна для того, чтобы обеспечивать расчет и формирование управления стендом с частотой выдачи сигнала управления 500-700Гц, а так же параллельно отображать в виде графиков процессы на основе показаний датчиков. Программной средой для управления стендом выбран пакет MATLAB/SIMULINK.
Усилительно-преобразовательное устройство (УПУ) выполнено в виде отдельного функционального блока. Оно представляет собой электронный усилитель мощности аналогового сигнала управления, формируемого персональным компьютером. В основу работы усилителя мощности положен принцип широтно-импульсного преобразования: непрерывный сигнал управления «заполняется» модулирующим сигналом частотой 2кГц и поступает на силовые ключи. Основные характеристики УПУ и двигателей постоянного тока: максимальное выходное напряжение 40В; максимальный ток одного канала 3А; коэффициент усиления по напряжению 4; коэффициент усиления встроенного тахогенератора 3В/(тыс.об/мин); номинальный электромагнитный силовой момент двигателя 0,11 Н·м; номинальное напряжение на якоре двигателя 30В; потребляемая двигателем мощность – не более 250Вт; питание – однофазное,220В, 50Гц.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.