Контур тока чаще всего настраивается на наибольшее быстродействие, т.е. на оптимум по модулю (ОМ). Параметры ПИ -регулятора тока с передаточной функцией Wрт(р)=β (τр+1)/τр рассчитываются по формулам:
 , где τ=Тя , ТΣ=Тдт+Тп.
, где τ=Тя , ТΣ=Тдт+Тп.
Передаточные функции разомкнутого Wркт(р) и замкнутого контура Wзкт(р) тока имеют вид:
 ;
;
 .
.
Наряду со структурной схемой, представленной на рис.4.2 в данном пункте для упрощения программы моделирования рассматривается эффективность алгоритма управления кратной синхронизацией с использованием результирующей (упрощенной) передаточной функции оптимизированного контура тока; структурная схема для которой представлена на рис.4.3.
Рис. 4.3 Упрощенная структурная схема СЭП №1
 .
.
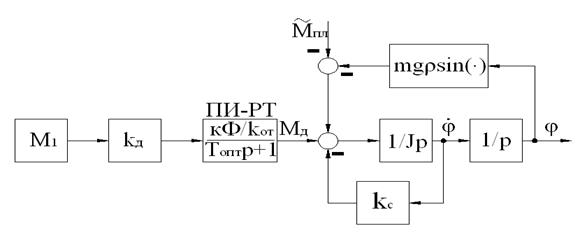
Рис.4.4 Упрощенная схема расчета динамики СЭП №2
Моделирование динамики СЭП в соответствии со
структурными схемами, представленными на рис.4.3 и рис.4.4 без учета влияния
платформы (![]() пл=0) при постоянном значении
момента М1=1Н·м проводилось в системе MATLAB/SIMULINK.
Параметры СЭП соответствуют значениям указанным для электромеханической системы
стенда СВ-2 : m=1,5(кг); ρ=0,04(м); J=0,014(кг·м2);
кс=0,01(Н·с); кот=1В/А; км=0,1(Н·м/А); ке=0,1(В·с/рад);
Rяц=10(Ом);
Тя=0,001(с); кп=7,5; Тп=0,001(с); β=0,333;
τ=0,001(с); Тдт=0,001(с); кд=1/кФ=10(Н·м/В).
пл=0) при постоянном значении
момента М1=1Н·м проводилось в системе MATLAB/SIMULINK.
Параметры СЭП соответствуют значениям указанным для электромеханической системы
стенда СВ-2 : m=1,5(кг); ρ=0,04(м); J=0,014(кг·м2);
кс=0,01(Н·с); кот=1В/А; км=0,1(Н·м/А); ке=0,1(В·с/рад);
Rяц=10(Ом);
Тя=0,001(с); кп=7,5; Тп=0,001(с); β=0,333;
τ=0,001(с); Тдт=0,001(с); кд=1/кФ=10(Н·м/В).
На рис. 4.5 и 4.6 представлены структурные модели для моделирования сравнительной динамики исходной структуры СЭП и соответствующих упрощенных моделей, представленных на рис. 4.3 и 4.4.
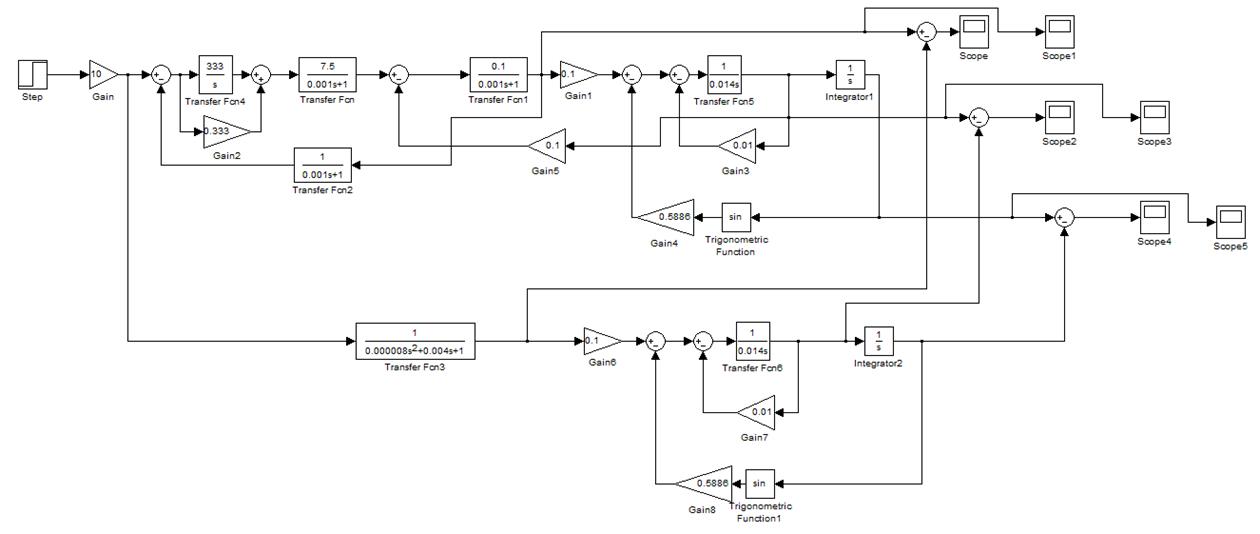
Рис.4.5 Структурная модель Matlab Simulink для моделирования сравнительной динамики исходной структуры СЭП и упрощенной модели №1.
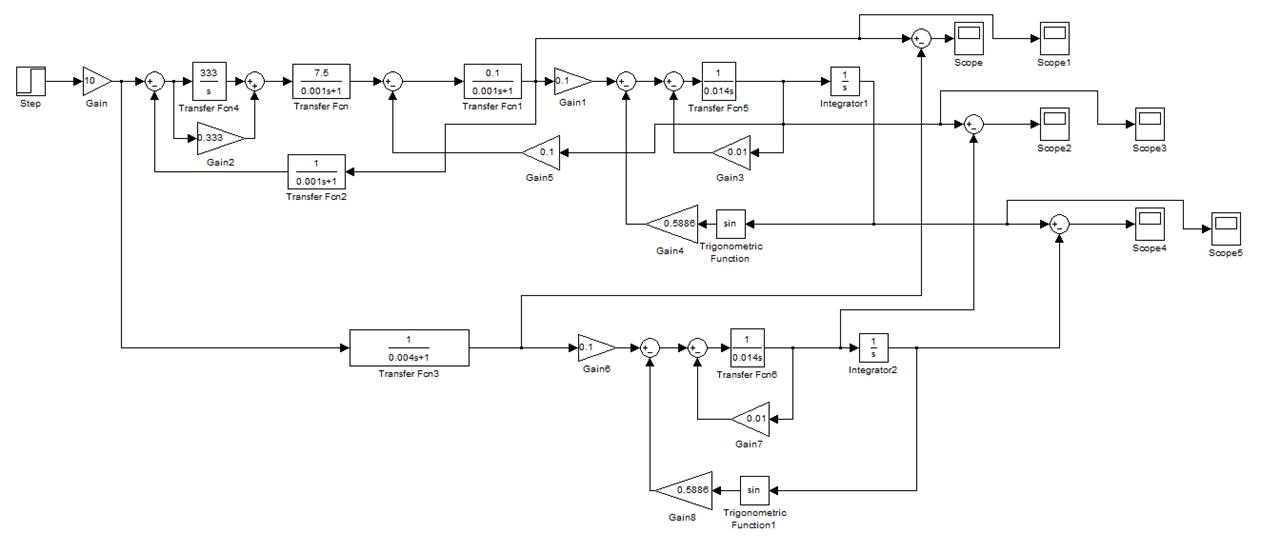
Рис.4.6 Структурная модель Matlab Simulink для моделирования сравнительной динамики исходной структуры СЭП и упрощенной модели № 2.
В результате моделирования анализировались графики
разностей для основных переменных (![]() ), получаемые при
использовании упрощенной модели №1 и упрощенной модели № 2. Соответствующие
графики представлены на рис. 4.8 и рис.4.9.
), получаемые при
использовании упрощенной модели №1 и упрощенной модели № 2. Соответствующие
графики представлены на рис. 4.8 и рис.4.9.
Кроме того на рис.4.7 представлены графики изменения
тока ![]() ,скорости ротора
,скорости ротора ![]() и
положения ротора
и
положения ротора ![]() для исходной (не упрощенной
модели).
для исходной (не упрощенной
модели).
а)
б)
в)
Рис. 4.7 Графики изменения: а) тока якоря ![]() б) скорости ротора
б) скорости ротора ![]() в)
положения ротора
в)
положения ротора ![]() .
.
№ 1,а)
№ 1,б)
№ 1,в)
Рис. 4.8 Графики разностей основных сигналов для
упрощенной модели № 1 : №1,а) разность токов ![]() ; №1,б)
разность скоростей
; №1,б)
разность скоростей ![]() ; №1,в) разность положений
; №1,в) разность положений ![]() и упрощенной модели №2 №2,а) разность
токов
и упрощенной модели №2 №2,а) разность
токов ![]() ; №2,б) разность скоростей
; №2,б) разность скоростей ![]() ; №2,в) разность положений
; №2,в) разность положений ![]()
№ 2,а)
№ 2,б)
№ 2,в)
Рис. 4.8 (Продолжение)
Структурная схема для реализации алгоритма управления синхронизацией с учетом динамики привода представлена на рис. 4.9 (для второго привода схема аналогичная).
Рис. 4.9 Структурная схема для реализации алгоритма управления синхронизацией с учетом динамики привода
Вывод: как показало сравнительное исследование динамики
неуравновешенного ротора с различными моделями электропривода максимальная
разность скоростей роторов ![]() для исходной модели и упрощенных
моделей № 1 и № 2 составляет не более
для исходной модели и упрощенных
моделей № 1 и № 2 составляет не более ![]() или
менее 0.1 % от установившейся скорости ротора.
или
менее 0.1 % от установившейся скорости ротора.
Поэтому в дальнейшем исследовании будет использоваться упрощенная модель динамики привода № 2, но для более достоверной оценки влияния динамики привода на синхронизацию постоянная времени оптимизированного контура тока будет увеличена в 2-15 раз.
4.4 Исследование алгоритма кратной сихронизации роторов с регулировкой установившегося кратного сдвига фаз.
В процессе иссследования алгоритма
управления кратной синхронизации (3.46) исследовалось влияние следующих
параметров: быстродействие привода,определяемое ![]() присоединенного
груза
присоединенного
груза ![]() .Заданный сдвиг фаз в алгоритме (3.46) -
.Заданный сдвиг фаз в алгоритме (3.46) - ![]() . В соответствии с данными пункта 4.3
. В соответствии с данными пункта 4.3 ![]() .
.
В данном разделе исследовались
возможности алгоритма кратной синхронизации при существенно более медленной
динамике привода,а именно при ![]() и
и ![]() . Траекторию присоединенного груза будем
рассматривать при массах от 1кг до 3 кг. Дальнейшее увеличение массы приводит к
стягиванию траектории груза в точку. Заданный сдвиг фаз в алгоритме выбирается
в диапазоне от -2 рад до 5 рад, что обеспечивает различные углы наклона
элиптической траектории присоединенного груза и различные значения
установившегося кратного сдвига фаз роторов.
. Траекторию присоединенного груза будем
рассматривать при массах от 1кг до 3 кг. Дальнейшее увеличение массы приводит к
стягиванию траектории груза в точку. Заданный сдвиг фаз в алгоритме выбирается
в диапазоне от -2 рад до 5 рад, что обеспечивает различные углы наклона
элиптической траектории присоединенного груза и различные значения
установившегося кратного сдвига фаз роторов.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.