 , (1.12)
, (1.12)
где ![]() - суммарная малая
постоянная времени контура скорости.
- суммарная малая
постоянная времени контура скорости.
Представленная модель может быть
принята за основу при разработки адаптивного регулятора, обеспечивающего
удовлетворительное качество динамики и статики электромеханической системы в
условиях нестационарности суммарного момента инерции ![]() .
.
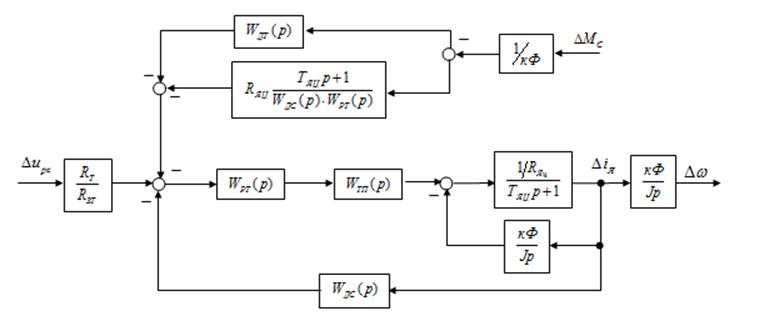
Рис. 1.10. Структурная схема унифицированной системы регулирования скорости.
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() Рис. 1.11. Структурная
схема преобразованного контура тока.
Рис. 1.11. Структурная
схема преобразованного контура тока.
1.3. Постановка задач дипломной работы
Представим формализованную постановку задачи управления кратной синхронизацией.
Пусть динамическая модель вибрационной системы, в которой вибровозбудители связаны через общее несущее тело, имеет вид:
 (1.13)
(1.13)
где
функция F0 описывает динамику связующего тела; Fi,
i=1,…,k описывают динамику вибровозбудителей,![]() -
описывают взаимосвязи систем, ui(t) – управляющее воздействие на
i-ый вибровозбудитель, заданное как функция времени. Пусть x1(t),…,
xk(t) - решения системы (1.13) с начальными условиями x1(0),…,
xk(0), определенные для t
-
описывают взаимосвязи систем, ui(t) – управляющее воздействие на
i-ый вибровозбудитель, заданное как функция времени. Пусть x1(t),…,
xk(t) - решения системы (1.13) с начальными условиями x1(0),…,
xk(0), определенные для t![]() [t0, ∞).
[t0, ∞).
В соответствии с [17] процессы x1(t),…, xk(t) называют синхронизированными по отношению к функционалам g1,…,gl , если тождества
![]() (1.14)
(1.14)
верны
для t![]() [t0, ∞), где yi(
[t0, ∞), где yi(![]() ) - функции выходов вибровозбудителей yi(t)=h(xi(t),t),
t
) - функции выходов вибровозбудителей yi(t)=h(xi(t),t),
t![]() [t0, ∞), i=1,…,k. Если вместо
тождеств (1.14) имеют место неравенства
[t0, ∞), i=1,…,k. Если вместо
тождеств (1.14) имеют место неравенства
![]() (1.15)
(1.15)
где ε>0 - некоторое положительное число, то говорят, что вибровозбудители приближенно синхронизированы по отношению к функционалам g1,…,gl.
В случае отсутствия самосинхронизации вибровозбудителей [4] возникает задача управляемой синхронизации по отношению к функционалам gj, j=1,…,l, которая состоит в нахождении управления u(t) как функции обратной связи по состояниям x0,x1,…,xk и времени u(t)=U(x0, x1,…,xk, t) при условии, что условие (1.14) выполнено для замкнутой системы.
Важными типами синхронизации для вибросистем является частотная и координатная синхронизация вибровозбудителей.
Частотная синхронизация понимается как точное совпадение скоростей вибровозбудителей: ωs=ωr ; s, r=1,…,k.
Более общий случай - это кратная частотная синхронизация, когда скорости вибровозбудителей пропорциональны:
![]() (1.16)
(1.16)
для некоторых целых ni, где ω*>0 - синхронная частота.
Здесь функционалы:
 . (1.17)
. (1.17)
На практике для случая кратной синхронизации скоростей (средних скоростей) вибровозбудителей имеет смысл рассматривать приближенную синхронизацию.
 ,
(1.18)
,
(1.18)
где ε>0 численно может быть выбрано ε=0,05ω*, по аналогии с заданной точностью при традиционном определении времени переходного процесса.
Координатная синхронизация возникает, когда выходы или некоторые фазовые координаты одной из подсистем вибровозбудителей совпадают с соответствующими координатами других подсистем при всех t≥t0.
Следуя логике представленных выше определений синхронизации, вводится понятие кратной координатной синхронизации, при которой фазы вибровозбудителей φi, i=1,…,k удовлетворяют тождествам:
 . (1.19)
. (1.19)
Ниже предлагается решение задачи синтеза алгоритма управляемой синхронизации для нестационарной вибросистемы, обеспечивающего кратную частотную и кратную координатную синхронизацию вибровозбудителей.
В случае отсутствия кратной самосинхронизации возникает задача управляемой синхронизации. В работе эта задача ставится в следующем виде. Пусть динамическая модель управляемой вибрационной системы имеет вид
 (1.20)
(1.20)
где ui – дополнительное управляющее воздействие, приложенное к i-му вибровозбудителю. Задача управления кратной синхронизацией по отношению к функционалам gj, j=1,…,l, состоит в нахождении управлений ui как функций обратной связи по состояниям x0,x1,…,xk и, возможно, времени так, что условие (1.14) выполнено для замкнутой системы. Аналогично ставится задача управления приближенной кратной синхронизацией и, в частных случаях – управления кратной частотной и координатной синхронизацией.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.