 |
Рис. 1.6 Структура оптимизированного контура.
Имея ввиду, что коррекция контура будет
осуществляться в результате придания определенных динамических свойств
регулятору, отнесем к неизменяемой части системы объект и звено с малой
постоянной времени![]() . Тогда передаточная функция скорректированной
разомкнутой системы будет:
. Тогда передаточная функция скорректированной
разомкнутой системы будет:
![]() , где передаточная функция неизменяемой части системы
, где передаточная функция неизменяемой части системы  .
.
Применяя пропорционально-интегральный
регулятор (ПИ-регулятор) с теоретически бесконечно большим коэффициентом
усиления в статическом режиме  , можно записать:
, можно записать:
 , где
, где ![]() - динамический
коэффициент усиления в области больших частот
- динамический
коэффициент усиления в области больших частот  ;
;
![]() - постоянная времени регулятора;
- постоянная времени регулятора; ![]() - постоянная времени объекта;
- постоянная времени объекта; ![]() - коэффициент передачи объекта.
- коэффициент передачи объекта.
Если выбрать:
 , (1.1)
, (1.1)
то  , (1.2)
, (1.2)
Передаточная функция замкнутого контура
по управлению, в соответствии с выражением  ,
будет:
,
будет:
 , (1.3)
, (1.3)
где
 .
.
При ступенчатом управляющем воздействии
выходная величина в первый раз достигает установившегося значения через время ![]() ; перерегулирование составляет 4,3% (рис.
1.8.). Длительность переходного процесса не зависит от постоянной времени
объекта
; перерегулирование составляет 4,3% (рис.
1.8.). Длительность переходного процесса не зависит от постоянной времени
объекта ![]() и определяется только малой постоянной
времени
и определяется только малой постоянной
времени ![]() . Такой способ настройки называется
настройкой оптимум по модулю (ОМ). Наиболее простое объяснение этого термина
состоит в том, что при настройке на оптимум по модулю стремятся в широкой
полосе частот сделать модуль частотной характеристики замкнутого контура
близким к единице.
. Такой способ настройки называется
настройкой оптимум по модулю (ОМ). Наиболее простое объяснение этого термина
состоит в том, что при настройке на оптимум по модулю стремятся в широкой
полосе частот сделать модуль частотной характеристики замкнутого контура
близким к единице.
Если выбрать ![]() в
соответствии с формулой (1.4), но принять
в
соответствии с формулой (1.4), но принять ![]() ,
то можно получить передаточную функцию разомкнутого контура, настроенного на
симметричный оптимум (СО):
,
то можно получить передаточную функцию разомкнутого контура, настроенного на
симметричный оптимум (СО):
 , (1.4)
, (1.4)
Вид соответствующей логарифмической частотной характеристики (ЛЧХ) представлен на рис. 1.7
Передаточная функция замкнутого контура по управлению может быть представлена в следующем виде:
 , (1.5)
, (1.5)
Настройка регулятора на ![]() может быть произведена и в том случае,
когда объект представляет собой апериодическое звено. В отличии от
характеристики, соответствующей настройке на симметричный оптимум, ЛЧХ
разомкнутого контура в этом случае имеет излом при частоте
может быть произведена и в том случае,
когда объект представляет собой апериодическое звено. В отличии от
характеристики, соответствующей настройке на симметричный оптимум, ЛЧХ
разомкнутого контура в этом случае имеет излом при частоте  (на рис. 1.7 оказано штрих
пунктиром). Если
(на рис. 1.7 оказано штрих
пунктиром). Если ![]() в 10-20 раз больше
в 10-20 раз больше![]() , то в зоне существенных частот
характеристики контура почти совпадают с характеристиками на СО и, сказанное
выше о соответствующих переходных процессах справедливо. Чем меньше
, то в зоне существенных частот
характеристики контура почти совпадают с характеристиками на СО и, сказанное
выше о соответствующих переходных процессах справедливо. Чем меньше ![]() по сравнению с
по сравнению с ![]() , тем больше запас по фазе и тем меньше
перерегулирование при скачке управляющего воздействия.
, тем больше запас по фазе и тем меньше
перерегулирование при скачке управляющего воздействия.
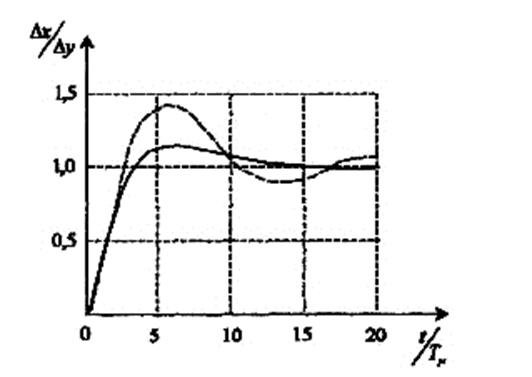
Рис. 1.7 Переходный процесс в контуре при стандартных настройках и скачке управляющего воздействия.
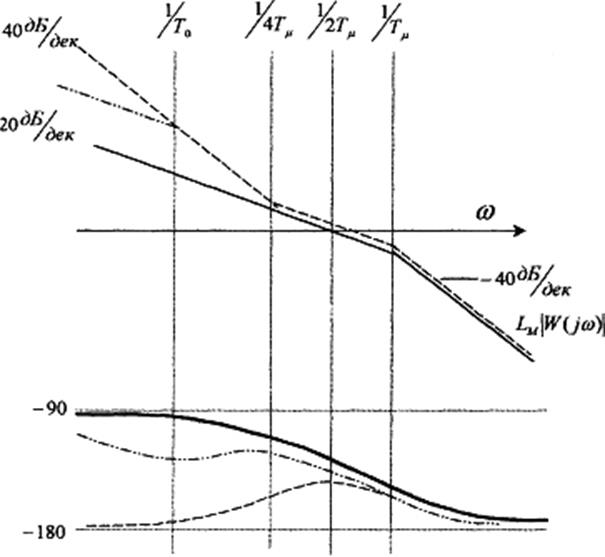
Рис. 1.8 Логарифмические частотные характеристики разомкнутого контура при стандартных настройках на ОМ ¾ и СО ---
при ПИ-регуляторе.
Звенья с малыми постоянными времени могут располагаться не только в прямом канале, но и в канале обратной связи. Выведены формулы настроек, обеспечивающих в этом случае наибольшее приближение переходного процесса на выходе контура к стандартному. Однако, как правило, запаздывание в цепи обратной связи определяется лишь фильтрами на выходе датчиков регулируемой величины и невелико. В этом случае разница между характером изменения самой величины и выходного напряжения датчика незначительна.
Особенно широко распространены стандартные настройки в системах с подчиненными контурами регулирования. Система при этом структурно разбивается на несколько контуров, каждый из которых содержит свой объект регулирования. Настройка внутреннего контура производится на ОМ или СО. Внешний по отношению к нему контур включает в себя соответственный объект, звенья с малыми постоянными времени и замкнутый внутренний контур. При работе параметров регулятора внешнего контура внутренний контур учитывается как звено с некоторой эквивалентной малой постоянной времени. В свою очередь, рассматриваемый контур может быть внутренним по отношению к последующему. Такой принцип построения системы упрощает ее настройку, обеспечивает высокое быстродействие системы и простое ограничение выходных величин внутренних контуров в результате ограничения выходных напряжений регуляторов внешних контуров.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.