c_1, c_2, с_3, с_4, с_5 – коэффициенты жесткости пружин;
alfa1, alfa2, gamma1, gamma2 – коэффициенты алгоритмов управления;
H, HG –текущее и желаемое значение полной механической энергии системы;
t0, tfin – начальное и конечное время интегрирования управлений стенда;
rasa – текущее значение разности фаз роторов;
ts – время синхронизации;
r - расстояние от места крепления пружин до центра платформы по оси абсцисс;
delta – определитель;
flag – вспомогательная переменная;
deltaphi – заданный приведенный сдвиг фаз
Вектор состояния системы состоит из следующих переменных:
x1= х – положение платформы по горизонтали;
x2= ẋ– скорость платформы по горизонтали;
x3=у – положение платформы по вертикали;
х4= ẏ - скорость платформы по вертикали;
x5, х6 – угол
поворота платформы и скорость поворота φ,![]() ;
;
х7, х8 –
положение и скорость первого дебаланса φ1,![]() ;
;
х9, х10 –
положение и скорость второго дебаланса φ2,![]() ;
;
x11=хг – положение груза по горизонтали;
x12 = ẋг– скорость груза по горизонтали;
х13=yг - положение груза по вертикали;
х14 - ẏг - скорость груза по вертикали;
x15- mg(t) – переменная масса груза;
В программе выводятся графики изменения следующих переменных (обозначения графиков на рис. 4.10-4.27 осуществляется с помощью букв «а»-«о»):
а) Изменение положения платформы по горизонтали: x(t), м;
б) Изменение положения груза по горизонтали: х1(t), м; в) Изменение положения платформы по вертикали: y(t), м;
г) Изменение положения груза по вертикали: y1(t), м; д) Положения роторов: φ1, φ2, рад;
е) Текущее значение приведенного сдвига фаз: (2φ1- φ1)(t), рад;
ж) Скорости
роторов: ![]() ,
,![]() , с-1; з) Разность
кратных скоростей роторов:
, с-1; з) Разность
кратных скоростей роторов: ![]() (t), с-1
(t), с-1
и) Управляющий электромеханический момент двигателей М1,Нм к) Управляющий электромеханический момент двигателей М2,Нм л) Разность вертикальных положений платформы и груза у-у1
м) Скорость груза по горизонтали dх1/dt
н) Траектория движения платформы: y(х);
о) Траектория движения центра масс груза: y1(х1);
В программе выводятся на монитор следящие значения:
Установившееся значение разности фаз rasfaz, рад;
Моделирование проводилось при следующих значениях параметров модели динамики механической системы:
моменты инерции: J1=J2=0.014 кг∙м2, J=0.2 кг∙м2; масса платформы: mpd=9 кг; масса груза: mg= var; жесткость пружин по горизонтали и вертикали: c1=5300 Н/м, c2=5300 Н/м, c3=164 Н/м, c4=2000 Н/м; c5=2650 Н/м;
коэффициент вязкого трения в подшипниках: k_с= 0.01 кг∙м2/с; коэффициент демпфирования пружин: β=5 кг/с; эксцентриситет дебаланса: ρ=0.04 м;
расстояние от места крепления пружин до центра платформы по оси абсцисс
r =0.2 м;
заданная энергия: H*=75Дж
4.3. Исследование работоспособности алгоритмов управления кратной синхронизацией с учетом динамики систем электропривода
Поскольку в изучаемом стенде СВ-2 используются приводные двигатели постоянного тока, то и структура электрической части привода выбрана традиционной , как одноконтурная система с контуром тока. Контур скорости не рассматривался, поскольку датчики скорости в системе не предусмотрены. Структурная схема одноконтурной системы электропривода (СЭП) для одного из неуравновешенных роторов представлена на рис. 4.2.
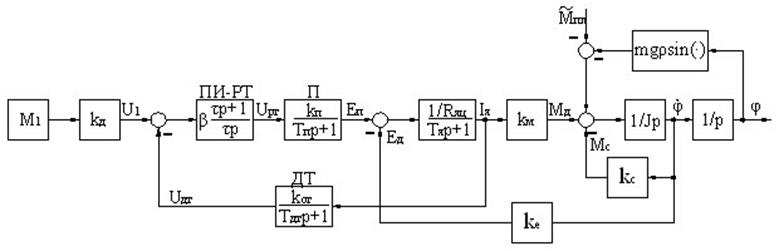
Рис.4.2.Структурная схема одноконтурной СЭП.
Здесь использованы следующие обозначения: ПИ-РТ – пропорционально-интегральный регулятор тока; П – силовой преобразователь; ДТ – датчик тока; Iя – ток якоря; Еп, Ед – ЭДС преобразователя и двигателя; Мд – электромеханический момент двигателя; Мс – момент сопротивления неуравновешенного ротора, обусловленный вязким трением; кд=1/кФ – коэффициент передачи двигателя по моменту; кп, кот – коэффициенты усиления преобразователя и обратной связи по току; кФ – коэффициент момента (ЭДС) двигателя; кс – коэффициент вязкого трения; Тп, Тдт – постоянные времени преобразователя и датчика тока; Тя – электромагнитная постоянная времени двигателя; Rяц – сопротивление якорной цепи; β, τ – динамический коэффициент усиления и постоянная времени регулятора; Uрт, Uдт – выходные напряжения регулятора тока и датчика тока; U1 – напряжение, соответствующее расчетному значению момента М1, полученному в соответствии с одной из формул (3.28), (3.30), (3.33), (3.34).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.