По окончании режима пуска целесообразно поддерживать постоянство потребляемой мощности. Для сохранения как можно больших значений силы тяги до максимальной скорости движения целесообразно изменять ее обратно пропорционально скорости. Такой закон изменения силы тяги при постоянстве мощности соответствует изменению напряжения пропорционально корню квадратному из скорости. Это нецелесообразно, так как увеличение напряжения вызовет ухудшение массогабаритных показателей ТД и преобразователя. Изменение питающего напряжения обратно пропорционально корню квадратному из скорости движения при постоянстве мощности соответствует постоянству тока статора и магнитного потока.
Вследствие ухудшения массогабаритных показателей ТД и преобразователя при реализации закона изменения силы тяги от скорости движения, приходится отказаться от постоянства магнитного потока и регулировать ток двигателя в диапазоне скоростей от Va до Vmax таким образом, чтобы поддерживать постоянство потребляемой мощности и напряжения питания. При этом сила тяги будет изменяться обратно пропорционально квадрату скорости. Так как
U1 » CfФ,
то с ростом скорости магнитный поток будет изменяться обратно пропорционально частоте (скорости). По аналогии с ТД постоянного тока этот режим называется регулированием возбуждения.
Максимальную частоту питающего напряжения выбирают исходя из максимальной скорости движения ЭПС и параметров ТД и тяговой передачи:
 .
.
Минимальную частоту выбирают из условия трогания с места при условии, что ТД реализует силу тяги, превышающую номинальную на 30–50% при минимальном токе статора.
Неоспоримым достоинством асинхронного ТД является достаточно легкий переход в режим торможения (без переключений в силовой цепи). Для перехода в режим торможения необходимо выполнить два условия:
1. Необходимо снизить частоту магнитного поля статора ниже частоты вращения ротора. При этом скольжение становится отрицательным, что соответствует генераторному режиму. Это условие реализуется системой управления.
2. Питание обмотки статора обеспечивается реактивной составляющей тока, так как имеется необходимость создания магнитного потока. Это условие реализуется в зависимости от принятой схемы преобразователя частоты.
Тормозные характеристики асинхронного ТД определяются законами регулирования напряжения и частоты. Характеристики ограничены условиями реализации максимальной тормозной силы по условиям сцепления колес с рельсами.
До настоящего времени в России ЭПС с асинхронными ТД в серию не пошел в основном по причинам недостаточной развитости полупроводниковой и микропроцессорной техники. Были созданы опытные образцы: ВЛ80А, ВЛ86Ф, поезд метрополитена.
В настоящее время разрабатываются несколько образцов ЭПС с асинхронными ТД: ЭП100 – скоростное движение, постоянный ток; ЭП10 – двойное питание; ЭТ2А и ЭД6 – пригородное движение, постоянный ток; ЭН3 – пригородное движение, переменный ток; ЭС250 ("Сокол") – скоростное движение, двухсистемный.
9.2. Тяговые и тормозные свойства вентильного ТД.
Принцип действия вентильного ТД основан на взаимодействии вращающегося поля статора (как у асинхронного ТД) с полем ротора, которое создается постоянным током. Отсюда вытекает, что по сравнению с асинхронным ТД, вентильный ТД имеет несколько меньшую активную длину статора и ротора за счет необходимости иметь контактные кольца для передачи тока в обмотку ротора; и требует несколько больших эксплуатационных расходов.
 Так
же, как и АТД для питания вентильного ТД на ЭПС постоянного тока необходим автономный
инвертор тока или напряжения, а на ЭПС переменного тока – выпрямитель и автономный
инвертор.
Так
же, как и АТД для питания вентильного ТД на ЭПС постоянного тока необходим автономный
инвертор тока или напряжения, а на ЭПС переменного тока – выпрямитель и автономный
инвертор.
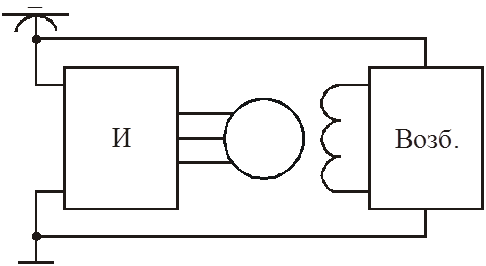
Принцип действия вентильного ТД можно сравнить с принципом действия ТД постоянного тока. Но обмотка ротора играет роль главных полюсов, обмотка статора – роль якоря, а преобразователь – коллектора.
При питании вентильного ТД от сети постоянного тока необходимо иметь автономный инвертор, а при питании от сети переменного тока – преобразователь числа фаз. Преобразователь числа фаз является одновременно выпрямителем и инвертором, поэтому ПЧФ называют преобразователем с неявно выраженным звеном постоянного тока.
Взаимодействие магнитного поля ротора с токами в обмотках фаз статора создает вращающий момент
М = СФ×Iс×ки,
где ки – коэффициент инвертирования, связанный с условиями коммутации тиристоров преобразователя.
 ,
,
где d – угол запаса инвертора;
g – угол коммутации тиристоров.
При вращении ротора в обмотках статора наводится ЭДС
Е = СФ×n×ки.
Эта ЭДС меньше подводимого напряжения на величину падения напряжения на активных сопротивлениях обмоток статора:
Uд = СФ×n×ки – Iс×Rc.
Таким образом, частота вращения ротора
 .
.
Из формулы следует, что частоту вращения вентильного двигателя можно регулировать посредством величины питающего напряжения и магнитного потока ротора, т.е. тока возбуждения. Это делает его еще более похожим на двигатель постоянного тока. Электромеханические характеристики вентильного ТД сходны с характеристиками ТД постоянного тока.
Вследствие наличия полупроводникового управляемого преобразователя и сложной системы управления у вентильного двигателя, в отличии от двигателя постоянного тока, возможно реализовать такие же законы регулирования, что и у асинхронного ТД.
До скорости выхода на номинальную характеристику желательно иметь максимальную силу тяги. Обеспечение этого режима осуществляется путем поддержания постоянства тока статора за счет увеличения питающего напряжения при неизменном токе возбуждения.
Максимальное значение вращающего момента реализуется при взаимно перпендикулярном положении оси полюсов ротора и полюсов статора, т.е. при взаимно перпендикулярном направлении намагничивающих сил ротора и статора. Это условие выполняется при синхронном вращении ротора и поля статора. Частота вращения поля статора
 .
.
Так как частота вращения поля статора должна быть равна частоте вращения ротора (nc = n), то по мере роста скорости движения (частоты вращения ротора) необходимо увеличивать частоту питающего напряжения. Это осуществляется системой управления по сигналам датчика положения ротора.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.