Проблема применения бесколлекторных ТД привлекла разработчиков ЭПС практически одновременно с появлением электрической тяги. В швейцарском городе Лугано в 1896 г. на трамвайном вагоне впервые были использованы трехфазные ТД мощностью 15 кВт. Система трехфазного тока на электровозах с асинхронными ТД разрабатывалась в Италии, Франции, Венгрии, США. Перед Второй мировой войной в Германии велись разработки электровоза с вентильными ТД. Поскольку для эффективной работы бесколлекторного ТД необходима реализация сложных законов регулирования, то при недостаточном развитии полупроводниковой техники ЭПС получается очень сложным и ненадежными в работе.
9.1. Тяговые и тормозные свойства асинхронного ТД.
В асинхронном ТД используется взаимодействие вращающегося магнитного поля статора с током, наведенным этим полем в роторе. Вращающий момент асинхронного ТД описывается следующей формулой:
 ,
,
где С – постоянная, зависящая от параметров двигателя;
U1 – питающее напряжение;
s – скольжение ротора;
f1 – частота питающего напряжения.
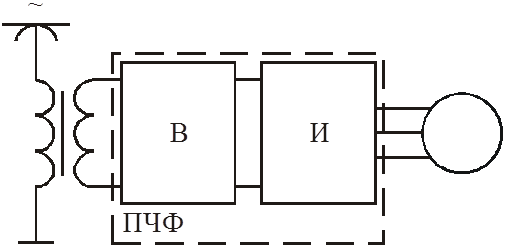
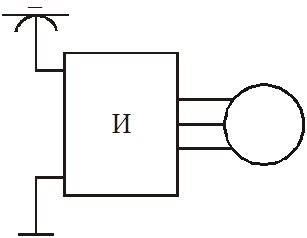
Для питания АТД на ЭПС постоянного тока необходимо иметь автономный инвертор напряжения или тока. На ЭПС переменного тока кроме автономного инвертора необходим выпрямитель. И выпрямитель и инвертор могут быть объединены в одном полупроводниковом устройстве – преобразователе числа фаз (ПЧФ).
Т.к. нагрузка ТД в эксплуатации может изменяться в широких пределах, то имея сложную многофункциональную систему управления важно и должно соблюдать условия, при которых ТД работает в наиболее экономичном режиме:
DРmin = (DРм + DРс + DР2) = const.
В первом приближении считают, что механические DРм и магнитные DРс потери в двигателе не зависят от нагрузки, т.е. от тока ротора. Потери в роторе
DР2 = М(w1 – wвр).
Рассмотрим, при каком условии потери минимальны. Так как мы условились, что потери механические и магнитные не зависят от нагрузки, то условие минимума потерь сводится к минимуму потерь в роторе:
 .
.
Следовательно условие
DРmin = const
преобразуется в условие
f2 min = (f1 – fвр)min = const.
Для выявления способов реализации этого условия рассмотрим два режима работы двигателя. Допустим, что в первом режиме статор питается напряжением U1 с частотой f1, а в другом – соответственно U1' и f1'. Относительное скольжение ротора в этих режимах равно:
 .
.
Вращающий момент в этих режимах будет соответственно равен:
 .
.
Найдем соотношение моментов в этих режимах при условии
f1 – fвр = f1' – fвр' = const:
 .
.
Отсюда
 .
.
Этот закон оптимального частотного управления асинхронным двигателем был сформулирован М.П.Костенко в 1925 г. Из этого выражения следует, что оптимальный режим работы асинхронного двигателя определяется соотношением трех его параметров – напряжения и частоты статора, а так же вращающего момента. Изменяя соотношение этих составляющих таким образом, чтобы соблюдалось условие минимума потерь т.е. условие работы с максимальным КПД и cosj. При больших нагрузках следует учитывать падение напряжения в обмотке ротора и для получения наилучших показателей вносить коррективы в закон регулирования. С этой целью на электровозах применяется система автоматического регулирования режимов работы ТД.
Поскольку для электрической тяги удобнее иметь выражение закона регулирования не от частоты питающего напряжения и момента, а от скорости и силы тяги, то выражение закона Костенко преобразуется следующим образом:
 .
.
Выражение получено с допущением, что на рабочей части характеристики скорость движения пропорциональна частоте питающего напряжения без учета скольжения:
 ,
,
а сила тяги, как известно, пропорциональна вращающему моменту без всяких допущений:
 .
.
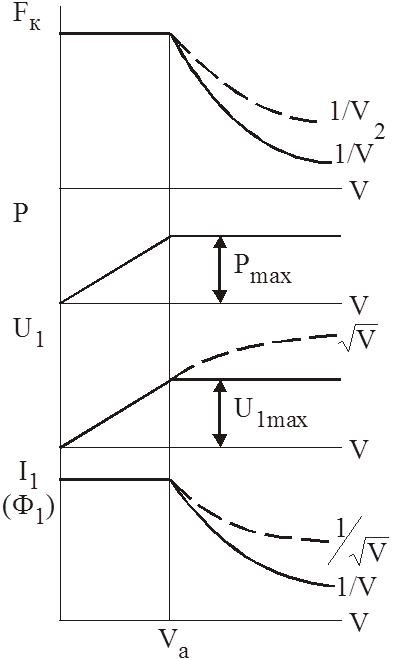
Для ЭПС наиболее характерен следующий закон регулирования: до скорости выхода на номинальную характеристику поддерживается постоянство силы тяги, а затем – постоянство мощности.
Постоянство силы тяги означает постоянство вращающего момента. Вращающий момент определяется взаимодействием магнитного потока статора и тока ротора, приведенного к обмотке статора (I2'). Следовательно, постоянство вращающего момента равносильно I2' = const. Ток статора можно представить как сумму векторов тока холостого хода и тока ротора, приведенного к обмотке статора:
![]() .
.
Следовательно, постоянство тока ротора равносильно постоянству тока статора и закон регулирования при постоянстве силы тяги будет выглядеть следующим образом:
 .
.
 Т.е. для поддержания
постоянной силы тяги необходимо с ростом скорости повышать напряжение питания,
пропорционально скорости или частоте.
Т.е. для поддержания
постоянной силы тяги необходимо с ростом скорости повышать напряжение питания,
пропорционально скорости или частоте.
После выхода на номинальную характеристику целесообразно поддерживать постоянной мощность, потребляемую из сети, т.е. мощность двигателя. Поскольку
 ,
,
то
 .
.
Следовательно
 .
.
Иными словами, для поддержания постоянства потребляемой мощности необходимо с ростом скорости изменять питающее напряжение пропорционально корню квадратному из его частоты.
Логично предположить, что система автоматического управления способна реализовать алгоритм поддержания постоянной скорости движения. Как следует из формулы, постоянство скорости соответствует постоянству частоты питающего напряжения, а
 ,
,
т.е. при постоянной скорости движения необходимо изменять питающее напряжение пропорционально корню квадратному из силы тяги.
Если поддерживать постоянным напряжение питания, то
 ,
,
т.е. при постоянстве питающего напряжения тяговая характеристика (Fк(V)) представляет собой квадратичную гиперболу – как у ТД постоянного тока с ненасыщенной магнитной системой.
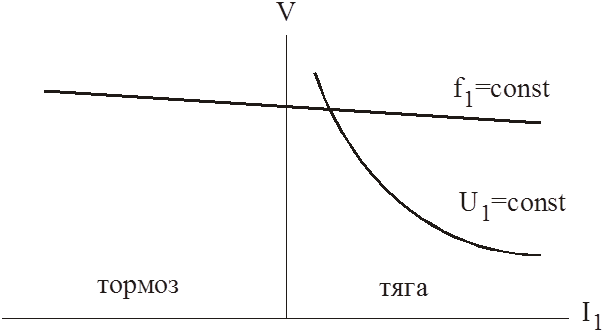 Таким образом, одним из
достоинств асинхронного ТД является возможность с помощью системы управления
реализовывать различную жесткость характеристик: при постоянстве частоты
реализуется жесткая характеристика (хороша при необходимости использовать
максимальную силу по условиям сцепления), при постоянстве напряжения – мягкую.
Таким образом, одним из
достоинств асинхронного ТД является возможность с помощью системы управления
реализовывать различную жесткость характеристик: при постоянстве частоты
реализуется жесткая характеристика (хороша при необходимости использовать
максимальную силу по условиям сцепления), при постоянстве напряжения – мягкую.
Как было сказано выше, до скорости выхода на номинальную характеристику целесообразно поддерживать постоянство силы тяги. Для этого необходимо изменять напряжение питания пропорционально скорости движения. По аналогии с ТД постоянного тока это режим пуска. Постоянство силы тяги соответствует постоянству тока статора, а, следовательно, и магнитного потока. В режиме пуска мощность изменяется прямо пропорционально скорости движения.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.