Проблема вождения длинносоставных поездов в России встала перед железнодорожниками впервые в конце 40х в начале 50х годов (еще при паровозной тяге) на особо грузонапряженных участках как один из способов увеличения пропускной способности железных дорог без значительных капиталовложений. Собственно говоря, можно выделить следующие способы повышения пропускной способности железных дорог:
- повышение скоростей движения (за счет усиления верхнегостроения пути, искусственных сооружений и идеального содержания пути);
- оборудование автоблокировкой;
- строительство вторых и третьих путей;
- замена подвижного состава на более мощный, включая электрификацию.
Все перечисленные способы требуют капитальных вложений (какие-то больших, какие-то меньших). При использовании того же тягового подвижного состава увеличение массы поездов, а, следовательно, и их длины позволяет увеличить пропускную способность как отдельных участков, так и железных дорог в целом.
В СССР в 80х годах велись как теоретические разработки в области теории вождения тяжеловесных и длинносоставных поездов, так и практическое воплощение этих идей. В 90х годах эта идея "заглохла" в связи с уменьшением объема грузоперевозок. В настоящее время грузовые перевозки оживились и МПС РФ вновь поставило перед железными дорогами вопрос о практическом увеличении длины состава, а перед вузами – задачу теоретической помощи при решении практических вопросов увеличения массы поезда и его длины (Указание №Е-367у от 16 марта 2001 г.).
Возможно увеличение массы поезда следующими способами:
1. Без увеличения числа локомотивов. Данный способ неосуществим на участках, на которых масса поезда ограничена мощностью локомотива при движении на затяжном подъеме или нагреванием обмоток ТД.
2. С увеличением числа локомотивов
- во главе поезда (применение многосекционных локомотивов или нескольких локомотивов по системе многих единиц);
- во главе поезда и в хвосте поезда (применение "толкача");
- распределение локомотивов по длине поезда.
При использовании нескольких локомотивов, особенно распределенных по длине поезда, возникают трудности по их синхронному управлению. При ручном управлении таким поездом возможен обрыв поезда в режимах тяги и торможения и "выдавливание" отдельных вагонов в кривых участках пути при торможении, что может привести к крушению. Решение проблемы синхронного управления локомотивами возможно применением радиоуправления по системе многих единиц (СМЕ).
Рассмотрим процессы, происходящие в длинносоставном поезде с локомотивом (локомотивами во главе), движущимся с постоянной скоростью. В растянутом поезде длиной 2,5 км сумма зазоров в автосцепках может достигать 10 м. Реальный поезд в продольном направлении имеет число степеней свободы, равное числу вагонов в поезде из-за различия характеристик поглощающих аппаратов и различного износа деталей автосцепных приборов. Следовательно, вагоны могут перемещаться друг относительно друга и относительно центра тяжести поезда, то координата n-го вагона относительно центра тяжести
xn(t) = xn/o + Vn/o × t,
где Vn/o – скорость перемещения n-го вагона относительно центра тяжести.
n+1-й вагон имеет скорость перемещения относительно центра тяжести Vn+1/o ¹ Vn/o.
xn+1(t) = xn+1/o + Vn+1/o × t.
Если провести линию изменения координаты центра
тяжести поезда через начало координат (при равномерном движении это будет
прямая линия), то, вследствие разных скоростей перемещения n-го
и n+1-го вагонов линии изменения их координат будут пересекаться.
Так как вагоны связаны друг с другом, то пересечение графиков изменения их
координат будет 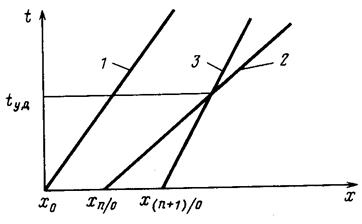 означать их соударение. В переходных режимах (изменение
силы тяги или торможения) из-за различных скоростей относительного перемещения
вагонов могут возникать продольные силы, которые приведут к разрушению
автосцепок или выдавливанию вагонов.
означать их соударение. В переходных режимах (изменение
силы тяги или торможения) из-за различных скоростей относительного перемещения
вагонов могут возникать продольные силы, которые приведут к разрушению
автосцепок или выдавливанию вагонов.
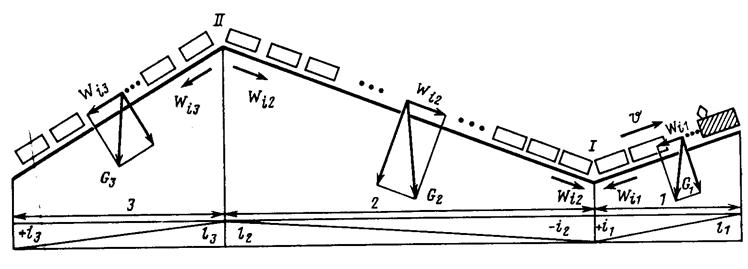
Движение длинносоставного поезда осложняется на переломистом профиле. Рассмотрим случай, когда поезд расположен на трех элементах профиля: головная и хвостовая часть – на подъеме, а средняя часть – на спуске. Локомотив, под действием увеличившегося сопротивления движения начал замедляться; головная часть поезда еще не начала замедляться; средняя часть поезда стремится двигаться равноускоренно под действием силы Wi2; хвостовая часть стремиться двигаться равнозамедленно под действием силы Wi3. Таким образом, средняя часть поезда набегает на головную и в зоне I появляется угроза выдавливания вагонов; а в зоне II – опасность обрыва поезда.
При изменении режима движения (разгон или торможение) ситуация усугубляется и может привести к крушению поезда.
Рассмотрим математическое выражение уравнения движения поезда по переломистому профилю. Предположим, что поезд массой М, длиной L находится на n-элементах профиля, имеющих уклоны соответственно i1, i2, …, in. Поезд состоит из вагонов различных типов с различной загрузкой, т.е. он имеет неоднородное распределение массы по элементам профиля m = ¦(x).
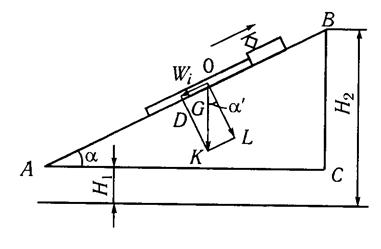
 Для
начала рассмотрим один элемент профиля. В произвольный момент времени на выбранном
элементе профиля находится часть поезда, массой mk.
На нее действует сила сопротивления движению от уклона
Для
начала рассмотрим один элемент профиля. В произвольный момент времени на выбранном
элементе профиля находится часть поезда, массой mk.
На нее действует сила сопротивления движению от уклона
Wi = mkgsinak.
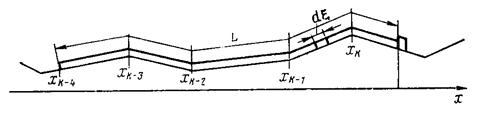
За элементарный промежуток времени dt происходит изменение силы сопротивления движению на dW за счет того, что масса поезда, находящаяся на выбранном элементе профиля изменилась на dm. Очевидно, что за время прохождения поездом этого элемента сила сопротивления движению будет равна:
 .
.
Вообще-то dx = dlcosak, но так как величина ak мала (при максимальном уклоне, существующем на магистральных железных дорогах 30‰ a = 1,7°), то можно считать dx = dl.
Переходя к поезду в целом можно записать:
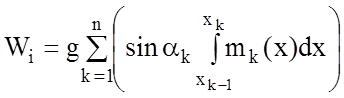 .
.
Уравнение движения поезда в этом случае будет иметь вид
 .
.
В том случае, если масса поезда равномерно распределена по его длине формула, существенно упрощается:
 .
.
Здесь m – удельная масса, приходящаяся на единицу длины поезда:
 .
.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.