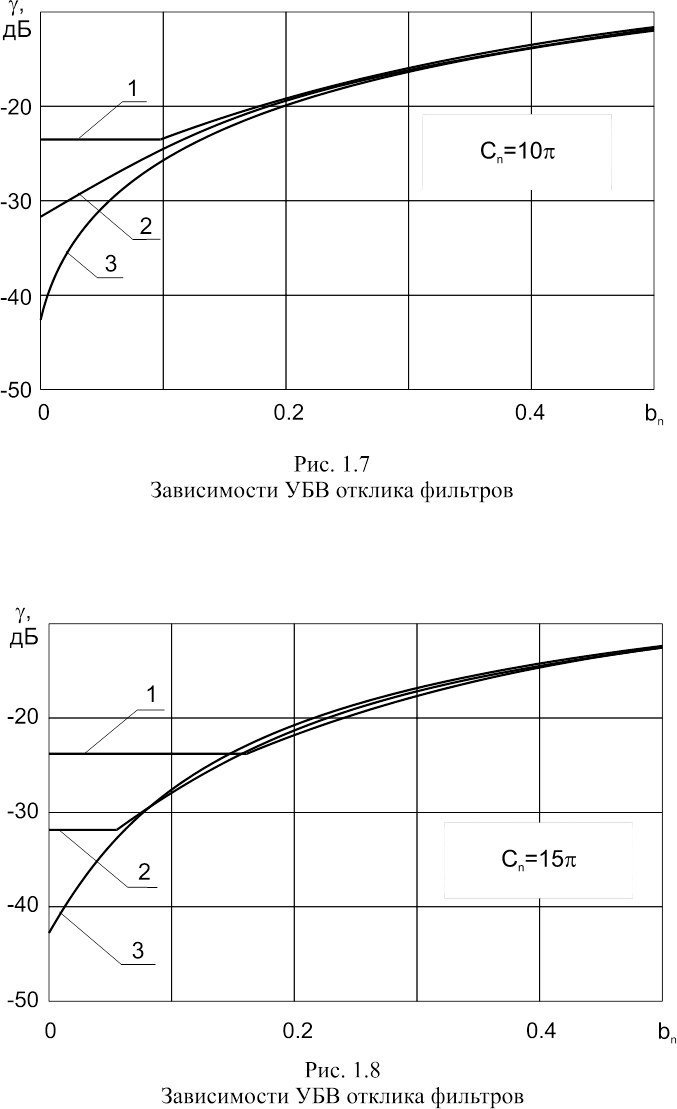
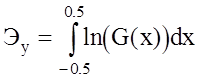
тотными искажениями, а также функции Бесселя высокого порядка, соответствующие дополнительным фазовым искажениям [8]. Однако анализ системы в данной ситуации не имеет смысла, т.к. при большом уровне искажений характеристики всех фильтров асимптотически сходятся к параметрам фильтра K1(x), что видно уже на рис. 1.7 и 1.8.
Проводились исследования влияния неточного определения ширины Dw и эффективной ширины 2b частот спектра входного сигнала на параметры отклика устройства обработки. Ошибки определения Dw и 2b в пределах ±10 % приводили к изменению УБВ на ±1 дБ и к расширению основного лепестка отклика фильтра не более чем на 3 %.
Таким образом, как показывают исследования [46], использование критерия (1.2) позволяет эффективно синтезировать устройства обработки, робастные к амплитудным и фазовым искажениям спектра сигнала, вносимым каналом связи.
Низкая чувствительность устройства обработки к изменению спектра сигнала необходима не только при приеме неизвестных сигналов. В схожих условиях работают системы, сигналы которых известны, но подвергаются сильным искажениям. Это, например, гидроакустические системы [14], системы дальней космической связи [15, 16] и системы подповерхностного зондирования [17]. То, что структура и параметры передаваемого сигнала известны, позволяет проводить обработку сигнала в СФ, однако из-за высокого уровня искажений качественные показатели подобных устройств получаются низкими.
С другой стороны, несмотря на
преимущества использования критерия (1.2) для синтеза робастных к искажениям
спектра сигнала устройств обработки, нельзя не отметить, что рассмотренные
устройства проигрывают СФ в отношении сигнал-шум. Для того, чтобы повысить
эффективность робастных уст-
ройств обработки, синтезированных по критерию (1.2), необходимо заложить робастные свойства в самом входном сигнале. Как было показано выше, для этого форма СПМ сигнала G(x) должна максимизировать функционал
 . (1.12)
. (1.12)
При наличии других общих предпосылок о желаемых параметрах сигналы с такой СПМ по своим свойствам максимально приближены к шуму [40, 47, 48].
Однако синтез по критерию (1.12) при ограничении только на энергию приводит к тривиальному решению G(x) = rect(x). Кроме того, к сигналам, применяемым в современных РТС, предъявляется много других, зачастую противоречивых, требований, определяемых конкретными условиями эксплуатации системы.
Например, в радиолокации с точки зрения повышения разрешающей способности желательно минимизировать постоянную разрешения по времени [8]
 . (1.13)
. (1.13)
В системах связи на величину дисперсии оценки времени запаздывания существенное влияние оказывает эффективная ширина спектра 2b сигнала [8], где
 .
.
Т.е. задача синтеза сигналов, обеспечивающих робастность параметров отклика СФ к изменению формы спектра входного сигнала, является многокритериальной. С учетом этих требований задача синтеза таких сигналов может быть поставлена как задача минимизации векторного показателя качества
I(G) = {I1(G), I2(G), I3(G), I4(G)}, (1.14)
где функционалы, входящие в (1.14), имеют вид
 ;
;  ;
;
 ;
;  .
.
Для решения задач векторной оптимизации широко применяется метод рабочих характеристик, основанный на критерии Парето [25]. Данный критерий задает необходимое и достаточное условия того, что сигнал с СПМ GI(x) лучше сигнала с СПМ GII(x) в виде
I(GI) £ I(GII). (1.15)
На основании соотношения (1.15) все пространство допустимых решений разбивается на непересекающиеся множества худших и нехудших сигналов и решением задачи векторной оптимизации будет множество нехудших сигналов.
Для отыскания множества нехудших по методу рабочих характеристик [25] все показатели качества Ii(G), кроме одного, переводятся в разряд ограничений типа равенств и ищется минимум данного показателя. Результатом решения задачи является множество всех нехудших сигналов и некоторых худших, называемое рабочей поверхностью. Отбрасывание худших сигналов осуществляется при дополнительном анализе рабочей поверхности.
Т.к. в рассматриваемом случае все показатели качества Ii(G) являются интегральными, данная задача относится к изопериметрическим задачам вариационного исчисления [44]. В силу принципа взаимности изопериметрических задач рабочие поверхности, получающиеся при минимизации любого из функционалов Ii(G) и отнесении других функционалов в разряд ограничений, совпадают. Для таких задач определение рабочей поверхности сводится к нахождению экстремума функционала
I(G) = I4(G) + l14I2(G) + l15I3(G) + l16I1(G), (1.16)
где l1i, при ![]() - множители Лагранжа.
- множители Лагранжа.
Решение уравнения Эйлера-Лагранжа, которое является необходимым условием наличия стационарной точки функционала (1.16), равно [49]
 .
.
Сравним характеристики сигнала с СПМ G1(x) и
сигналов с упомянутой выше СПМ G0(x) с точки зрения
критерия (1.12). На рис. 1.9
приведена зависимость выигрыша в значении удельной энтропии 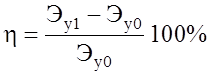 сигналов с СПМ G1(x) и G0(x) от УБВ g
на выходе СФ, а на рис. 1.10 - для сигналов с СПМ G1(x)
зависимости нормированной постоянной разрешения по времени TR (кривая 1) и
относительной дисперсии оценки времени запаздывания [8]
сигналов с СПМ G1(x) и G0(x) от УБВ g
на выходе СФ, а на рис. 1.10 - для сигналов с СПМ G1(x)
зависимости нормированной постоянной разрешения по времени TR (кривая 1) и
относительной дисперсии оценки времени запаздывания [8]
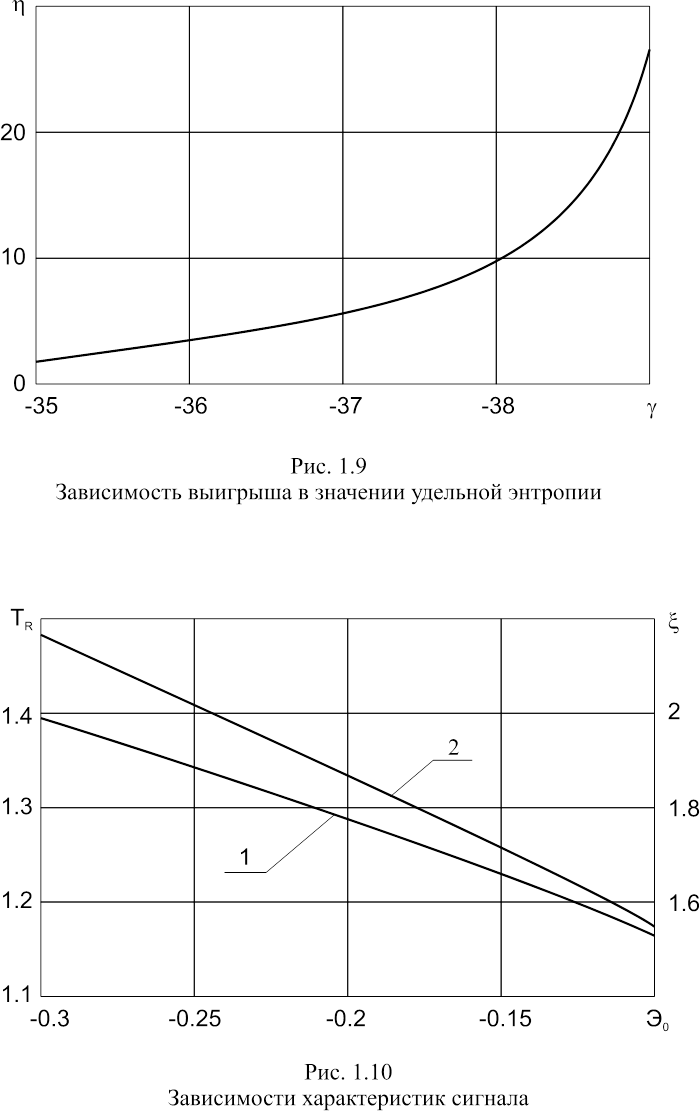
![]() (кривая
2), где
(кривая
2), где ![]() -
минимальная дисперсия оценки времени запаздывания при G(x) = rect(x), ½x½ £ 0.5,
от значений удельной энтропии Эó1. Из анализа рис. 1.9 следует, что в
области наиболее интересных для практики значений УБВ g выигрыш в
значении удельной энтропии сигналов с СПМ G1(x) по сравнению с
сигналом с СПМ Хэмминга может составлять 10 ¸ 30 %.
Кроме того, как показали исследования [49], в этом диапазоне изменения УБВ g отличие
параметров TR и x
для СПМ G1(x) и G0(x)
незначительно.
-
минимальная дисперсия оценки времени запаздывания при G(x) = rect(x), ½x½ £ 0.5,
от значений удельной энтропии Эó1. Из анализа рис. 1.9 следует, что в
области наиболее интересных для практики значений УБВ g выигрыш в
значении удельной энтропии сигналов с СПМ G1(x) по сравнению с
сигналом с СПМ Хэмминга может составлять 10 ¸ 30 %.
Кроме того, как показали исследования [49], в этом диапазоне изменения УБВ g отличие
параметров TR и x
для СПМ G1(x) и G0(x)
незначительно.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.