При необходимости проектировщик может написать свои специфические функции на языке Техно IL, сохранить их в соответствующих разделах библиотеки функций и встраивать в программы FBD в статусе стандартных функциональных блоков.
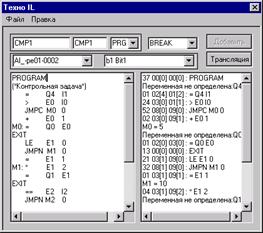
Рис. 3. Диалог редактирования IL-программ редактора базы каналов
Кроме того, на том же языке могут быть написаны метапрограммы (до 16 программ на 1 узел системы), управление вызовом которых осуществляется специальным системным каналом.
Мазуров Вячеслав Михайлович, профессор, д.т.н., эксперт
AdAstra Research Group, Ltd.
Москва, 107076, а/я 38, тел (095) 737-59-33, E-mail: adastra@adastra.msk.ru
Реализованные в ТРЕЙС МОУД алгоритмы адаптивного регулирования позволяют решать следующие задачи:
§ регулирование по стандартным ПИ и ПИД алгоритмам;
§ регулирование по усовершенствованному ПИД алгоритму;
§ самонастройка параметров ПИ и ПИД алгоритмов в процессе управления объектом.
Эти задачи можно решать для контуров регулирования, в которых применяются как пропорциональные исполнительные механизмы, так и интегрирующие. В последнем случае следует использовать адаптивный ПДД алгоритм в сочетании с ШИМ преобразованием.
Усовершенствованный ПИД алгоритм, в отличие от стандартного, не отрабатывает дифференциальную и пропорциональную составляющие при изменении задания. Это позволяет сократить динамическую погрешность. Однако переходный процесс регулирования при смене задания затягивается.
Использование усовершенствованного алгоритма оправдано в тех случаях, когда нельзя допускать перерегулирования, а время переходного процесса не является самым значимым параметром.
На приведенных ниже рисунках показаны переходные процессы при использовании стандартного и усовершенствованного алгоритмов регулирования.
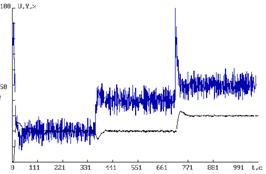
Рис. 1. Стандартный ПИД алгоритм
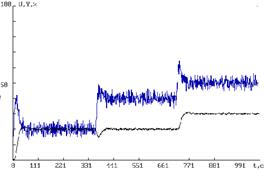
Рис. 2. Усовершенствованный ПИД алгоритм
Следующий рисунок демонстрирует структурную схему регулятора с использованием предлагаемого алгоритма самонастройки.
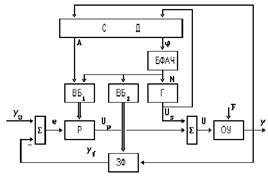 Рис.
3. Структурная схема адаптивного регулятора
Рис.
3. Структурная схема адаптивного регулятора
Самонастройка осуществляется параллельно с процессом регулирования. Для определения оптимальных настроек к выходу ПИД регулятора добавляется пробный гармонический сигнал. В процессе адаптации амплитуда колебаний на выходе объекта удерживается в рамках заданного ограничения. По умолчанию используется диапазон амплитуд 0.3 – 0.7%. Он в большинстве случаев не превышает допустимой погрешности регулирования.
На приведенном ниже рисунке показан процесс самонастройки регулятора в условиях наличия сильных шумов в тракте измерения.
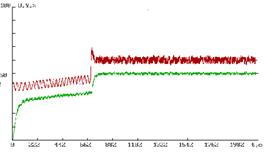
Рис. 4. Процесс самонастройки при наличии шумов
Реализованные в ТРЕЙС МОУД алгоритмы адаптивного регулирования позволяют:
§ осуществлять настройку всех существующих контуров регулирования одновременно;
§ получить оптимальные по точности регулирования настройки ПИД регулятора;
§ практически не нарушать в процессе самонастройки нормальный ход технологического процесса;
§ повторять самонастройку либо по команде пользователя, либо периодически для нестационарных объектов управления.
Предложенные алгоритмы обладают следующими особенностями:
§ работают в условиях высокого уровня шумов и случайных возмущений;
§ поддерживают исполнительные механизмы любых типов;
§ требуют минимум входных параметров;
§ сохраняют работоспособность автоматического регулирования на этапе самонастройки;
§ настраиваемые контуры регулирования могут находиться как в ручном, так и автоматическом режимах работы.
Адаптивный алгоритм настройки может быть распространён на всю совокупность контроллеров, подключённых к ТРЕЙС МОУД.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.