1) если уровень “ниже требуемого”, тогда клапан открыть “быстро”;
2) если уровень “требуемый”, тогда клапан “не изменять”;
3) если уровень ‘“выше требуемого”, тогда клапан закрыть “быстро”;
4) если уровень “требуемый” и скорость “уменьшается”, тогда клапан закрыть “медленно”;
5) если уровень “требуемый” и скорость “увеличивается”, тогда клапан открыть “медленно”.
Рассматриваемая система имеет математическое описание и может управляться обычным “четким” регулятором. Но она имеет нелинейные характеристики, и результаты экспериментов показали, что НЛР в данном случае действует значительно лучше ПИД-регулятора. Результаты моделирования представлены на рис. 2.
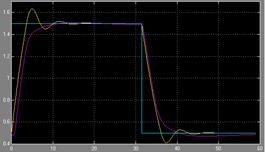
Рис.2.
На рисунке синим цветом обозначен требуемый уровень жидкости; желтым цветом – текущий уровень жидкости в баке, получаемый под управлением ПИД-регулятора; красным цветом – текущий уровень воды в баке, получаемый под управлением нечеткого регулятора.
Рассматривая текущее состояние нечеткого управления, можно констатировать, что нечеткое управление применимо в следующих областях.
1. Процессы, которые могут адекватно регулироваться человеком. Сконструированный регулятор должен иметь датчики, обеспечивающие его той же информацией, которая используется человеком при управлении процессом (например, использование нечеткой логики в автоматической коробке передач автомобиля, стиральные машины и т.д).
2. Процессы, которые сейчас управляются по линейным алгоритмам управления, необходимы будут в будущем для нелинейных алгоритмов управления, которые известны операторам или инженерам-технологам. Как заявлено Mamdani E.H. в 1994 году, нечеткая логика имеет успех потому, что она заменяет классический ПИД-регулятор. Настраивая параметры ПИД-регулятора, мы влияем на форму создания кривой управления. Нечеткая логика основана на правилах регулирования, поэтому форма кривой может создаваться индивидуально на каждом участке кривой, и с помощью нечеткой логики возможно ограничить влияние ее соседних участков.
Нечеткий регулятор в "Трейс Моуд" реализован в качестве функционального блока библиотеки регулирования (рис.4). Он имеет три функциональных входа и два выхода. На вход INP надо подавать регулируемое значение. Второй вход PV предназначен для ввода значения уставки. Вход IC предназначен для выбора типа объекта регулирования. Этот вход может принимать следующие значения:
0 – характеристики системы регулирования настраиваются с помощью функциональных блоков GD, ND и SD;
1 – регулирование низко инерционных параметров с постоянной времени, лежащей в диапазоне от 2 до 5 секунд;
2 – регулирование параметров средней инерционности с постоянной времени 5 – 60 секунд;
3 – регулирование высоко инерционных параметров - от 1 минуты до 30.
На выходе Q блока формируется величина управляющего воздействия. Выход dQ используется для вывода величины приращения управляющего воздействия на текущем пересчете блока.
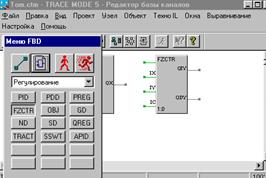
Рис. 3.
Формирование значений выходов осуществляется по следующему алгоритму:
Q = Q1 + dQ,
dQ = kg * dQg + kn * dQn + ks * dQs,
где
Q - управляющее воздействие;
Q1- управляющее воздействие на предыдущем такте;
dQ - приращение управляющего воздействия;
kg - принадлежность текущего рассогласования к категории «большое»;
kn - принадлежность текущего рассогласования к категории «среднее»;
ks - принадлежность текущего рассогласования к категории «малое»;
dQg - приращение управляющего воздействия по условию «большое» отклонение;
dQn - приращение управляющего воздействия по условию «среднее» отклонение;
dQs - приращение управляющего воздействия по условию «малое» отклонение;
Приращения по каждой из категорий отклонения рассчитываются по следующей формуле:
dQj = (K1j * (PV–INP) + K2j * SIGN(PV–INP) + K3j * dQ1 * SIGN(PV–INP)) / 5,
где
INP - значение регулируемой величины;
PV - значение уставки;
dQ1 - приращение управляющего воздействия на предыдущем такте пересчета;
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.