Таким образом, при движении по линии переключения мы получим процесс, соответствующий переходному процессу для апериодического звена первого порядка с постоянной времени t. Отметим проявившуюся в рассмотренном примере важную особенность поведения СПС в скользящем режиме: характеристики процесса не зависят от параметров a и b объекта управления, а определяются видом линии переключения (параметром t). Это свойство позволяет использовать СПС для обеспечения параметрической инвариантности САУ.
Выше было принято, что система находится в скользящем режиме. Попадание на поверхность разрыва и движение по ней обеспечивается соответствующим выбором управления. В нашем примере управляющее воздействие можно сформировать в виде
u(t) = -k1x1(t) – k2x2(t), где k1 и k2 - коэффициенты регулятора, значения которых изменяются блоком изменения структуры.
 |
Организуем переключение коэффициента k1 по прямым S(X) = tx2 +x1=0 и x1 = 0, то есть реализуем закон управления следующим образом:
![]() ,
,  (10)
(10)
где ![]() ,S(X) = tx2 + x1.
,S(X) = tx2 + x1.
Нетрудно
убедиться, что при надлежащем выборе t возможны два варианта расположения линии
переключения S(X) = 0 относительно
асимптоты ![]() гипербол (рис. 5). При t > 1 в системе
возникает скользящий режим по прямой tx2 + x1 = 0 (рис. 5, а),
при t <
1
получаем фазовый портрет, изображенный на рис. 5, б. Скользящий режим
в этом случае не возникает и система лишена рассмотренных выше положительных
свойств.
гипербол (рис. 5). При t > 1 в системе
возникает скользящий режим по прямой tx2 + x1 = 0 (рис. 5, а),
при t <
1
получаем фазовый портрет, изображенный на рис. 5, б. Скользящий режим
в этом случае не возникает и система лишена рассмотренных выше положительных
свойств.
Отметим, что на
прямой x1 = 0 также
происходит переключение структур, но она не является линией разрыва, так как в
соответствии с (10) здесь ![]() .
.
Сопоставление
случаев, показанных на рис. 5, а, б, показывает, что параметры
объекта (определяющие положение линии ![]() ) влияют на
выбор t, и,
следовательно, в соответствии с (9), ограничивают достижимое быстродействие СПС
с регулятором (10).
) влияют на
выбор t, и,
следовательно, в соответствии с (9), ограничивают достижимое быстродействие СПС
с регулятором (10).
2. Описание модели спс
Модель исследуемой системы строится в пакете SIMULINK в соответствии со схемой, изображенной на рис. 6.
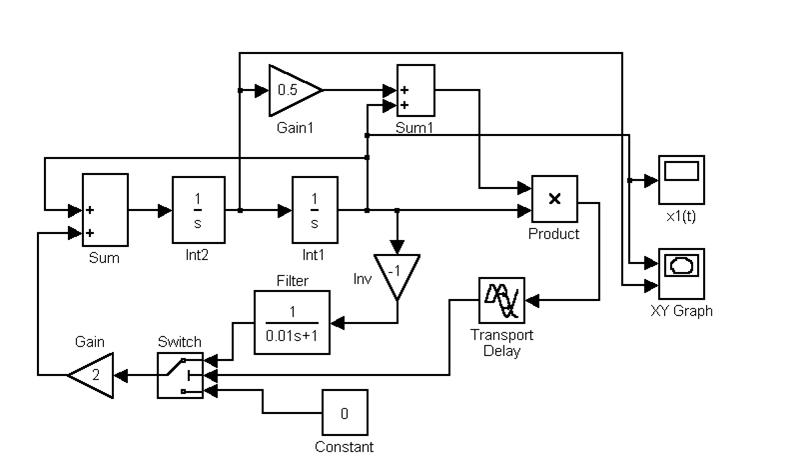
Рис. 6
Модель объекта управления (5) набирается из двух блоков интеграторов “Int1”, “Int2”, блоков “Sum” и “Gain”, последний задает параметр b. Заметим, что b> 1.
Положение линии переключения tx2 + x1 = 0 задается с
помощью блока “Gain1”, позволяющего выставить значение
параметра t, и блока “Sum1”. Положение
линии переключения x1 = 0 определяется
выходом x1 блока “Int1”. Условие
смены структуры ![]()
![]() фиксируется блоком произведения “Product”, извлекаемого
из раздела Nonlinear библиотеки SIMULINK.
фиксируется блоком произведения “Product”, извлекаемого
из раздела Nonlinear библиотеки SIMULINK.
Закон управления (10) в СПС реализуется
блоками “Switch”, “Filter”, “Inv” и “TransportDelay”. Блок “Switch” – звено
сравнения и коммутации входов, выполняющее операцию переключения значения
выхода с “0” на “![]() ” и наоборот в
зависимости от знака сигнала на выходе блока “Product”. Блок “Inv” осуществляет
инвертирование выхода
” и наоборот в
зависимости от знака сигнала на выходе блока “Product”. Блок “Inv” осуществляет
инвертирование выхода ![]() блока “Int1”.
блока “Int1”.![]() Блоки “TransportDelay” (звено чистого
запаздывания ) и “Filter” (апериодическое звено первого
порядка) учитывают постоянное временное запаздывание и инерционность,
свойственные реальному СПС-регулятору.
Блоки “TransportDelay” (звено чистого
запаздывания ) и “Filter” (апериодическое звено первого
порядка) учитывают постоянное временное запаздывание и инерционность,
свойственные реальному СПС-регулятору.
При снятии фазового портрета на
горизонтальный вход графопостроителя (блок “XY Graph” из раздела Sinks библиотеки SIMULINK ) подается
сигнал ![]() с выхода блока “Int1”, а на
вертикальный - сигнал
с выхода блока “Int1”, а на
вертикальный - сигнал ![]() с выхода блока
“Int2”.
с выхода блока
“Int2”.
3. Порядок выполнения работы
1. Произвести загрузку пакета MATLAB 5.0 из сети и войти в личный пользовательский каталог или создать его с помощью команды !md< имя каталога >.
2. Запустить SIMULINK из MATLAB 5.0.
3. Используя технологию “drag-and-drop”, построить модель СПС в соответствии с рис. 6.
4. Установить значения параметров системы b,tз ,Tф в соответствии с заданным преподавателем вариантом (табл. 1).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.