Содержание
Содержание.. 1
Часть I. Механика.. 4
ЭКСПЕРИМЕНТАЛЬНАЯ ПРОВЕРКА ОСНОВНОГО ЗАКОНА ДИНАМИКИ ДЛЯ ВРАЩАЮЩЕГОСЯ ТЕЛА. 4
ОПРЕДЕЛЕНИЕ МОМЕНТА ИНЕРЦИИ. 24
ФИЗИЧЕСКОГО МАЯТНИКА. 24
Определение ускорения свободного падения. 31
с помощью оборотного маятника. 31
ОПРЕДЕЛЕНИЕ МОМЕНТА ИНЕРЦИИ СИСТЕМЫ ТЕЛ. 38
С ПОМОЩЬЮ МАЯТНИКА ОБЕРБЕКА. 38
Часть II. Колебания и волны... 45
ОПРЕДЕЛЕНИЕ ЛОГАРИФМИЧЕСКОГО ДЕКРЕМЕНТА КОЛЕБАНИЙ МАЯТНИКА. 45
ОПРЕДЕЛЕНИЕ СКОРОСТИ ЗВУКА В ВОЗДУХЕ МЕТОДОМ СТОЯЧИХ ВОЛН. 53
Часть III. Молекулярная физика, термодинамика, явления переноса.. 63
ОПРЕДЕЛЕНИЕ ОТНОШЕНИЯ ТЕПЛОЕМКОСТЕЙ. 63
![]()
![]() ПО
МЕТОДУ КЛЕМАНА И ДЕЗОРМА. 63
ПО
МЕТОДУ КЛЕМАНА И ДЕЗОРМА. 63
ОПРЕДЕЛЕНИЕ КОЭФФИЦИЕНТА ВЯЗКОСТИ ЖИДКОСТИ. 73
ОПРЕДЕЛЕНИЕ СРЕДНЕЙ ДЛИНЫ СВОБОДНОГО ПРОБЕГА И ЭФФЕКТИВНОГО ДИАМЕТРА МОЛЕКУЛ ВОЗДУХА. 78
Часть IV. Электростатика.. 89
ИССЛЕДОВАНИЕ ЭЛЕКТРОСТАТИЧЕСКОГО ПОЛЯ. 89
ИЗМЕРЕНИЕ ЕМКОСТИ КОНДЕНСАТОРОВ. 99
Часть V. Постоянный электрический ток.. 107
ОПРЕДЕЛЕНИЕ ЭДС ИСТОЧНИКА ПОСТОЯННОГО ТОКА. 107
МЕТОДОМ КОМПЕНСАЦИИ. 107
ОПРЕДЕЛЕНИЕ УДЕЛЬНОГО СОПРОТИВЛЕНИЯ РАСТВОРА ЭЛЕКТРОЛИТА. 113
СНЯТИЕ ХАРАКТЕРИСТИК ТРЕХЭЛЕКТРОДНОЙ. 123
ЛАМПЫ. 123
ИЗУЧЕНИЕ ЭЛЕКТРИЧЕСКОГО СОПРОТИВЛЕНИЯ. 132
МЕТАЛЛОВ. 132
Часть VI. Магнитное поле.. 141
ОПРЕДЕЛЕНИЕ ГОРИЗОНТАЛЬНОЙ СОСТАВЛЯЮЩЕЙ НАПРЯЖЕННОСТИ МАГНИТНОГО ПОЛЯ ЗЕМЛИ. 141
ОПРЕДЕЛЕНИЕ УДЕЛЬНОГО ЗАРЯДА ЭЛЕКТРОНА МЕТОДОМ ФОКУСИРОВКИ ЭЛЕКТРОННОГО ПУЧКА МАГНИТНЫМ ПОЛЕМ.. 146
СНЯТИЕ КРИВОЙ НАМАГНИЧИВАНИЯ ЖЕЛЕЗА. 153
ИССЛЕДОВАНИЕ НАМАГНИЧИВАНИЯ ФЕРРОМАГНЕТИКОВ. 161
Часть VII. Электрический ток в различных средах.. 167
ИЗУЧЕНИЕ ТЕРМОЭЛЕКТРИЧЕСКИХ ЯВЛЕНИЙ. 167
КAЛИБРОВКА ТЕРМОПАРЫ.. 167
ИЗУЧЕНИЕ ЭЛЕКТРОПРОВОДНОСТИ ПОЛУПРОВОДНИКОВ. 174
СНЯТИЕ ВОЛЬТАМПЕРНОЙ ХАРАКТЕРИСТИКИ. 182
ПОЛУПРОВОДНИКОВОГО ДИОДА. 182
СНЯТИЕ ХАРАКТЕРИСТИК ПОЛУПРОВОДНИКОВОГО.. 187
ТРИОДА (ТРАНЗИСТОРА) 187
ИЗУЧЕНИЕ ЭФФЕКТА ХОЛЛА. 196
Часть VIII. Волновая оптика.. 209
ОпределениЕ фокусного расстояния. 209
собирающей и рассеивающей линз. 209
ОПРЕДЕЛЕНИЕ КОНЦЕНТРАЦИИ РАСТВОРА ПРИ ПОМОЩИ. 216
ФОТОМЕТРА ПУЛЬФРИХА И ФОТОЭЛЕКТРОКОЛОРИМЕТРА. 216
ФЭК-56. 216
ОПРЕДЕЛЕНИЕ ПОКАЗАТЕЛЯ ПРЕЛОМЛЕНИЯ И. 234
ДИСПЕРСИИ ЖИДКОСТИ РЕФРАКТОМЕТРОМ ИРФ-23. 234
ИЗУЧЕНИЕ СПЕКТРОВ ИЗЛУЧЕНИЯ ПРИ ПОМОЩИ МОНОХРОМАТОРА УМ-2. 245
Изучение характеристик спектральной призмы.. 254
с помощью гониометра. 254
ОПРЕДЕЛЕНИЕ ДЛИН ВОЛН С ПОМОЩЬЮ ОТРАЖАТЕЛЬНОЙ ДИФРАКЦИОННОЙ РЕШЕТКИ. 263
ОПРЕДЕЛЕНИЕ УДЕЛЬНОГО ВРАЩЕНИЯ И КОНЦЕНТРАЦИИ. 271
ОПТИЧЕСКИ АКТИВНОГО РАСТВОРА ПРИ ПОМОЩИ ПОЛЯРИМЕТРА. 271
ИЗУЧЕНИЕ ДИФРАКЦИИ СВЕТА ОТ УЗКОЙ ЩЕЛИ. 288
Часть IX. Квантовая оптика.. 300
ОПРЕДЕЛЕНИЯ ПОСТОЯННОЙ СТЕФАНА-БОЛЬЦМАНА С ПОМОЩЬЮ ОПТИЧЕСКОГО ПИРОМЕТРА. 300
ИЗУЧЕНИЕ ХАРАКТЕРИСТИК ФОТОЭЛЕМЕНТА. 309
Часть X. Квантовая механика и ядерная физика.. 324
ОПРЕДЕЛЕНИЕ ДЛИНЫ ВОЛНЫ ОПТИЧЕСКОГО.. 324
КВАНТОВОГО ГНЕРАТОРА С ПОМОЩЬЮ ЯВЛЕНИЯ ДИФРАКЦИИ. 324
ИССЛЕДОВАНИЕ проникающей способности β-частиц и Определение их максимальной энергии. 334
Приложения.. 344
ИЗМЕРЕНИЕ ФИЗИЧЕСКИХ ВЕЛИЧИН. 344
ЕДИНИЦЫ ИЗМЕРЕНИЯ И РАЗМЕРНОСТИ ФИЗИЧЕСКИХ ВЕЛИЧИН. 371
КРАТКИЕ СВЕДЕНИЯ. 384
ОБ ЭЛЕКТРОИЗМЕРИТЕЛЬНЫХ ПРИБОРАХ. 384
Часть
I. Механика
ЭКСПЕРИМЕНТАЛЬНАЯ ПРОВЕРКА ОСНОВНОГО ЗАКОНА ДИНАМИКИ ДЛЯ ВРАЩАЮЩЕГОСЯ ТЕЛА
Цель работы: проверка основного закона динамики для вращательного движения с помощью инерционного маятника.
Приборы и принадлежности: инерционный маятник, секундомер.
Теоретическое введение
Основной закон динамики для вращательного движения твердого тела вокруг неподвижной оси записывается в виде:
![]()
где M — момент силы относительно оси; I — момент инерции тела относительно оси; i — угловое ускорение.
Момент инерции является физической величиной, характеризующей инертность тела при вращательном движении. Момент инерции материальной точки относительно произвольной оси равен произведению ее массы на квадрат расстояния до этой оси:
![]()
![]()
Момент инерции тела относительно произвольной оси равен сумме моментов инерции всех точек тела относительно этой оси (см. рис. 1). Для тел правильной геометрической формы момент инерции может быть найден расчетным путем, для остальных тел — экспериментально.
При вращательном движении действие силы определяется не только величиной этой силы, но и ориентацией вектора силы относительно оси вращения. По этой причине вместо силы при вращательном движении рассматривается момент силы. Различают момент силы относительно точки и относительно оси.
Рис. 1. Схема определения момента инерции твердого тела
 |
Рис. 2. Определение направления момента силы относительно точки
Моментом силы
относительно точки называется векторное произведение радиус-вектора ![]() на величину силы
на величину силы ![]() (см. рис. 2):
(см. рис. 2):
![]()
Величина момента равна:
![]() ,
,
где α — угол между векторами ![]() и
и ![]() .
.
Вектор ![]() расположен перпендикулярно плоскости, в которой лежат вектора
расположен перпендикулярно плоскости, в которой лежат вектора ![]() и
и ![]() . Его направление (из двух возможных)
определяется по правилу векторного произведения: векторы
. Его направление (из двух возможных)
определяется по правилу векторного произведения: векторы
![]() ,
, ![]() и
и ![]() должны образовывать правую систему,
т.е. при вращении вектора
должны образовывать правую систему,
т.е. при вращении вектора ![]() по направлению к вектору
по направлению к вектору ![]() вдоль наименьшего угла направление вектора
вдоль наименьшего угла направление вектора ![]() определяется по правилу правого винта.
определяется по правилу правого винта.
 Рис. 3. Определение момента силы
относительно оси
Рис. 3. Определение момента силы
относительно оси
Рис. 4. Определение момента силы относительно оси в случае, когда сила лежит в плоскости, перпендикулярной оси вращения
 |
Рис. 5. Определение плеча силы
Моментом
силы относительно оси называется проекция на эту ось вектора момента силы
относительно любой точки, лежащей на данной оси (см. рис. 3). В частности, если
вектор силы ![]() лежит в плоскости, перпендикулярной
к оси вращения, момент этой силы относительно точки O,
лежащей на пересечении оси и плоскости, будет направлен вдоль оси (см. рис. 4).
В этом случае величина проекции M0 на ось совпадает с самим
моментом M0. Тогда момент силы относительно оси будет равен:
лежит в плоскости, перпендикулярной
к оси вращения, момент этой силы относительно точки O,
лежащей на пересечении оси и плоскости, будет направлен вдоль оси (см. рис. 4).
В этом случае величина проекции M0 на ось совпадает с самим
моментом M0. Тогда момент силы относительно оси будет равен:
![]()
 где h — плечо силы F
(см. рис. 5). Для практики данный случай особенно важен.
где h — плечо силы F
(см. рис. 5). Для практики данный случай особенно важен.
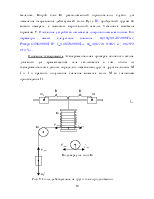
Угловое ускорение и угловая скорость. Угловой скоростью называется производная угла поворота радиус-вектора по времени:

Угловым ускорением называется производная угловой скорости по времени или вторая производная угла поворота радиус-вектора по времени:
 Векторы
Векторы ![]() и
и
![]() направлены вдоль оси вращения
(направление определяется по правилу винта, см. рис. 6).
направлены вдоль оси вращения
(направление определяется по правилу винта, см. рис. 6).
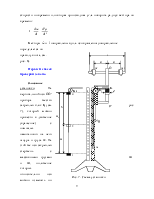
Первый способ проверки закона.
Описание установки. На вертикальной оси OO’ прибора жестко закреплен блок Б1 (см. рис 7), который можно привести в движение (вращение) с помощью намотанного на него шнура и груза m. На этой же оси закреплен стержень с массивными грузами m1 и m2, положение которых относительно оси можно изменять по желанию. Второй блок Б2, расположенный горизонтально, служит для изменения направления действующей силы. Путь H1, пройденный грузом m, можно измерять с помощью вертикальной шкалы. Установка снабжена тормозом Т. Описанное устройство называется инерционным маятником. Его параметры имеют следующие значения: m1=m2=(0.431±0.001)кг; P=mg=(1.506±0.005) H; lст=(0.510±0.005)м; mст=(0.111± 0.001) кг; r=(10-2± 5·10-5) м.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.