1. МАТЕМАТИЧЕСКИЕ МОДЕЛИ ОБЪЕКТОВ УПРАВЛЕНИЯ
Нижеприведем математические модели динамических объектов управления (ОУ), чаще всего используемых при синтезе систем управления. Будем считать, что объект одномерный, линейный, с сосредоточенными параметрами, без чистого запаздывания, устойчивый.
1. Дифференциальное уравнение (ДУ)
 . (1.1)
. (1.1)
Уравнению (1.1) при нулевых начальных условиях в объекте соответствует дробно-рациональная передаточная функция (ПФ)
 , (1.2)
, (1.2)
![]() - переменная Лапласа.
- переменная Лапласа.
ДУ
(1) и ПФ (2) характеризуются одной и той же совокупностью параметров ![]() ,
, ![]() и в
этом смысле представляют собой адекватные математические модели. Данные модели
чаще всего используются при синтезе систем управления.
и в
этом смысле представляют собой адекватные математические модели. Данные модели
чаще всего используются при синтезе систем управления.
2. Амплитудно-фазовая характеристика (АФХ).
Если
в выражении (1.2) переменную Лапласа ![]() заменить на
заменить на ![]() ,
, ![]() - круговая
частота, то будем иметь амплитудно-фазовую характеристику
- круговая
частота, то будем иметь амплитудно-фазовую характеристику
 . (1.3)
. (1.3)
При решении практических задач чаще используются амплитудная (АЧХ)
![]() (1.4)
(1.4)
и фазовая (ФЧХ)
 (1.5)
(1.5)
частотные
характеристики, ![]() - вещественная часть АФХ,
- вещественная часть АФХ, ![]() - мнимая часть АФХ,
- мнимая часть АФХ, ![]() - четные функции частоты,
- четные функции частоты, ![]() - нечетные функции частоты.
- нечетные функции частоты.
3. Интегральное уравнение свертки
 (1.6)
(1.6)
полностью
определяется математической моделью в виде импульсной характеристики (ИХ)
![]() , удовлетворяющей условию физической
реализуемости устойчивого объекта
, удовлетворяющей условию физической
реализуемости устойчивого объекта ![]() при
при ![]() ,
, ![]() .
.
Следует отметить, что иногда вместо выражения (6) используется интегральное уравнение Винера-Хопфа
 , (1.7)
, (1.7)
где ИХ связывает посредством интегрального оператора не сигналы, а корреляционные функции. Здесь

- взаимная корреляционная функция входного и выходного сигналов,
![]()
- автокорреляционная функция входного сигнала,
![]()
- математические ожидания входного и выходного сигналов.
Представленные три типа математических моделей взаимно связаны между собой посредством преобразований Лапласа и Фурье.
Связь
между ИХ ![]() и ПФ
и ПФ ![]() осуществляется через пару преобразований
Лапласа
осуществляется через пару преобразований
Лапласа
 ,
,

![]()
![]() ,
, ![]() - радиус сходимости.
- радиус сходимости.
Связь
между ИХ ![]() и АФХ
и АФХ ![]() осуществляется через пару преобразований Фурье
осуществляется через пару преобразований Фурье
 ,
,
![]()
 .
.
4. Разностное уравнение
 , (1.8)
, (1.8)
которому соответствует дискретная ПФ (ДПФ)
 ,
, ![]() , (1.9)
, (1.9)
![]() - шаг
дискретизации по времени (
- шаг
дискретизации по времени (![]() ).
).
Связь
между ДПФ ![]() и ИХ
и ИХ ![]() ,
, ![]() ,
осуществляется парой
,
осуществляется парой ![]() -преобразования
-преобразования
 ,
,
 .
.
2. ОБЩИЕ СВЕДЕНИЯ ОБ ИДЕНТИФИКАЦИИ
Идентификацией объекта управления (ОУ) будем
называть процедуру определения математической зависимости между входным ![]() и выходным
и выходным ![]() сигналами
ОУ (рис. 1) на основе обработки этих сигналов. Указанная зависимость и
будет представлять собой математическую модель данного объекта.
сигналами
ОУ (рис. 1) на основе обработки этих сигналов. Указанная зависимость и
будет представлять собой математическую модель данного объекта.
Рис. 2.1
Математическая модель служит для оценивания и прогнозирования ненаблюдаемых переменных состояния объекта, прогнозирования наблюдаемых переменных, расчета стратегии управления. В качестве иллюстрации постановки задачи идентификации и определения математической модели рассмотрим некий линейный стационарный динамический объект, который описывается дифференциальным уравнением (ДУ) вида
. (2.1)
Необходимо
определить порядки ![]() и
и ![]() левой и
правой частей ДУ и коэффициенты
левой и
правой частей ДУ и коэффициенты ![]() ,
, ![]() .
.
Априорной
информацией для решения задачи идентификации являются измеренные (как правило,
с помехами) входной ![]() и выходной
и выходной ![]() сигналы объекта подлежащего идентификации.
сигналы объекта подлежащего идентификации.
Наличие аддитивных
помех ![]() и
и ![]() ,
использование численных методов в алгоритмах идентификации (методическая
погрешность), обработка информации на ЦВМ (вычислительная погрешность)
приводят к тому, что результатом решения задачи идентификации будут лишь оценки
искомых параметров математической модели
,
использование численных методов в алгоритмах идентификации (методическая
погрешность), обработка информации на ЦВМ (вычислительная погрешность)
приводят к тому, что результатом решения задачи идентификации будут лишь оценки
искомых параметров математической модели ![]() ,
, ![]()
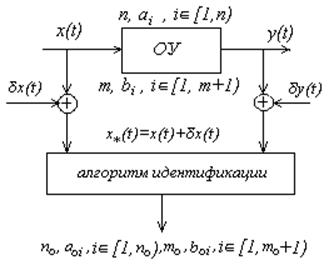
Рис. 2.2
Помехи
![]() и
и ![]() возникают
по причине преобразования сигналов любой физической природы в электрические
сигналы вида удобного для обработки на ЦВМ. Цепочку преобразования можно
представить в следующем виде: датчик (первичный преобразователь)
возникают
по причине преобразования сигналов любой физической природы в электрические
сигналы вида удобного для обработки на ЦВМ. Цепочку преобразования можно
представить в следующем виде: датчик (первичный преобразователь) ![]() нормирующее устройство
нормирующее устройство ![]() АЦП
АЦП ![]() буфер
памяти. Все эти устройства несовершенны и вносят искажения в процессе преобразования.
Кроме того может оказывать влияние и окружающая среда в виде каких-либо
возмущающих воздействий.
буфер
памяти. Все эти устройства несовершенны и вносят искажения в процессе преобразования.
Кроме того может оказывать влияние и окружающая среда в виде каких-либо
возмущающих воздействий.

Рис. 2.3
Идентификация
называется активной, если входной сигнал ![]() - тестовый
(подается на объект со специального генератора). Если же он измеряется в процессе
нормального функционирования объекта, то имеет место пассивная идентификация.
- тестовый
(подается на объект со специального генератора). Если же он измеряется в процессе
нормального функционирования объекта, то имеет место пассивная идентификация.
Определение
порядков левой ![]() и правой
и правой ![]() частей
ДУ называют структурной идентификацией, а определение
коэффициентов
частей
ДУ называют структурной идентификацией, а определение
коэффициентов ![]() , и
, и ![]() – параметрической
идентификацией. Это касается и передаточной функции (ПФ)
– параметрической
идентификацией. Это касается и передаточной функции (ПФ) ![]() , где
, где ![]() и
и ![]() - порядок и коэффициенты полинома
знаменателя
- порядок и коэффициенты полинома
знаменателя ![]() , а
, а ![]() и
и ![]() - порядок и коэффициенты полинома
числителя
- порядок и коэффициенты полинома
числителя ![]() ПФ.
ПФ.
Задачи
определения импульсной характеристики (ИХ) ![]() ,
амплитудной (АЧХ)
,
амплитудной (АЧХ) ![]() и фазовой (ФЧХ)
и фазовой (ФЧХ) ![]() частотных характеристик называются непараметрической
идентификацией.
частотных характеристик называются непараметрической
идентификацией.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.




