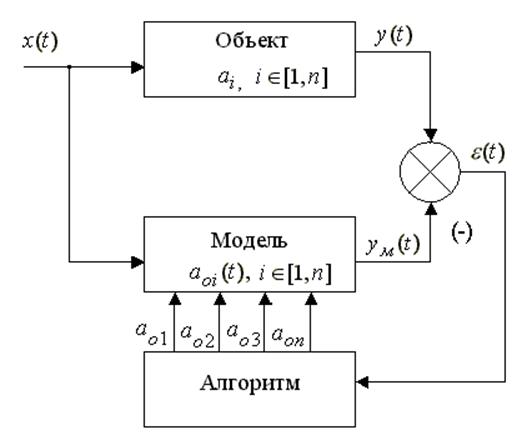
(на слайдах не хватает минуса на сумматоре)
Априори предполагается, что существует
 ,
, ![]() ,
, ![]() , (6.1)
, (6.1)
где ![]() -
выбираемый критерий настройки модели по параметрам
-
выбираемый критерий настройки модели по параметрам ![]() .
.
Если предположение (6.1) выполняется то алгоритм идентификации (подстройки параметров модели к параметрам объекта) имеет вид
 , (6.2)
, (6.2)
где ![]() - задаваемые начальные
условия параметров модели.
- задаваемые начальные
условия параметров модели.
В качестве иллюстрации функционирования ГСМ рассмотрим пример.
 .
.
Дифференциальное уравнение модели
 .
.
Критерий настройки параметров модели к параметрам объекта выберем в виде
Тогда, в предположении, что
на интервале длительностью ![]() (этапе подстройки
параметров модели)
(этапе подстройки
параметров модели)
![]()
![]() , можно записать
, можно записать
где
 ,
, ![]()
называются функциями чувствительности модели по ее параметрам и представляют собой решение дифференциального уравнения чувствительности
 ,
, ![]() , с нулевыми начальными условиями
, с нулевыми начальными условиями
![]()
![]()
При этом алгоритм идентификации (6.2) принимает вид
 ,
, ![]() .
.
Корректирующими
параметрами алгоритма являются время усреднения ![]() ,
коэффициенты
,
коэффициенты ![]() ,
, ![]() ,
корректирующие динамику системы, начальные условия
,
корректирующие динамику системы, начальные условия ![]() ,
, ![]() .
.
Достоинством ГСМ
является тот факт, что это система замкнутого типа и потому, если выходной
сигнал ![]() объекта искажен центрированной и не коррелирующей
с
объекта искажен центрированной и не коррелирующей
с ![]() помехой
помехой ![]() , то ее
наличие не приводит к смещенности оценок
, то ее
наличие не приводит к смещенности оценок ![]() .
.
Недостатки ГСМ.
1. ГСМ описываются системой нелинейных, нестационарных, интегро-дифференциальных уравнений, заданных в неявном виде и потому не представляется возможным провести необходимый теоретический анализ не только точности и быстродействия, но даже устойчивости.
2. Как правило
критерии настройки ![]() не унимодальные и потому сходимость
параметров модели
не унимодальные и потому сходимость
параметров модели ![]() к параметрам объекта
к параметрам объекта ![]() ,
,![]() будет иметь место, если
начальные условия
будет иметь место, если
начальные условия ![]() ,
, ![]() достаточно
близки к параметрам объекта
достаточно
близки к параметрам объекта ![]() ,
,![]() ,
а это связано с необходимостью наличия дополнительной априорной информации.
,
а это связано с необходимостью наличия дополнительной априорной информации.
3. Функции
чувствительности ![]() являются функциональными производными
и их определение через модели чувствительности справедливо только при очень
медленном изменении параметров модели
являются функциональными производными
и их определение через модели чувствительности справедливо только при очень
медленном изменении параметров модели ![]() ,
,![]() . Поэтому ГСМ имеют принципиально
низкое быстродействие.
. Поэтому ГСМ имеют принципиально
низкое быстродействие.
4. ГСМ характеризуются
сильной взаимной связью между каналами идентификации. Поэтому с увеличением
количества ![]() подстраиваемых параметров быстродействие
резко падает.
подстраиваемых параметров быстродействие
резко падает.
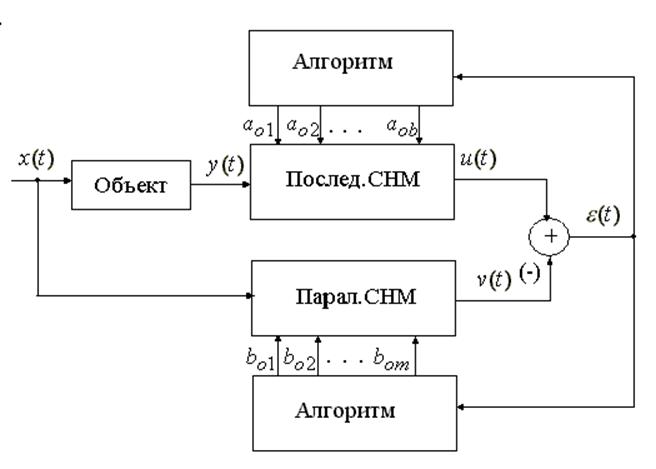
Рис. 6.2 Структурная схема системы идентификации с НГСМ
Пусть объект описывается уравнением
 . (6.3)
. (6.3)
Последовательная модель имеет вид
 , (6.4)
, (6.4)
а параллельная
 . (6.5)
. (6.5)
Коэффициенты
![]() ,
, ![]() последовательной
и параллельной моделей задаются априори из условия их устойчивости, а при
необходимости и из дополнительных условий, например, обеспечения требуемой
полосы пропускания параллельной модели для сглаживания помех
последовательной
и параллельной моделей задаются априори из условия их устойчивости, а при
необходимости и из дополнительных условий, например, обеспечения требуемой
полосы пропускания параллельной модели для сглаживания помех![]() .
.
Если ввести в рассмотрение: рассогласование
![]() , ошибку по параметрам
последовательной модели
, ошибку по параметрам
последовательной модели
![]() , ошибку по параметрам
параллельной модели
, ошибку по параметрам
параллельной модели
![]() , то динамику НГСМ можно
описать системой дифференциальных уравнений
, то динамику НГСМ можно
описать системой дифференциальных уравнений
 .
.
Алгоритм идентификации синтезируется из условий устойчивости
![]() и
и ![]() , а в качестве критерия
устойчивости можно использовать, например, второй метод Ляпунова или
гиперустойчивости Попова.
, а в качестве критерия
устойчивости можно использовать, например, второй метод Ляпунова или
гиперустойчивости Попова.
При использовании второго метода Ляпунова выбирается функция Ляпунова, например, в виде
 , (6.6)
, (6.6)
где ![]() и
и
![]() определяют скорость сходимости алгоритма и
задаются из условия коррекции динамики системы идентификации, причем
определяют скорость сходимости алгоритма и
задаются из условия коррекции динамики системы идентификации, причем![]() ,
, ![]() ,
, ![]() ,
, ![]() и, в
частности, их можно положить равными единице.
и, в
частности, их можно положить равными единице.
Согласно критерия Ляпунова устойчивость будет иметь место, если
 .
(6.7)
.
(6.7)
Определим
вспомогательную функцию ![]() , которая получается при
почленном вычитании уравнения (7.3) из уравнения (7.2)
, которая получается при
почленном вычитании уравнения (7.3) из уравнения (7.2)
 .
.
В полученном выражении заменим
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.