1.Вопрос
Электроприводом называется электромеханическая система, предназначенная для преобразования электрической энергии в механическую энергию вращательного либо поступательного движения исполнительного органа (ИО) рабочей машины (РМ) и управления этим движением в целях осуществления технологического процесса.
Рабочая машина – машина, осуществляющая изменение формы, свойств, состояния и положения предметов труда.
Исполнительный орган рабочей машины – движущийся элемент рабочей машины, выполняющий технологическую операцию.
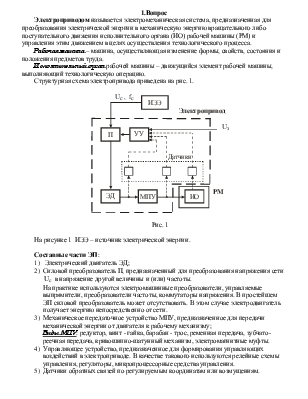
Структурная схема электропривода приведена на рис. 1.
Рис. 1
На рисунке 1 ИЭЭ – источник электрической энергии.
Составные части ЭП:
1) Электрический двигатель ЭД;
2)
Силовой преобразователь П,
предназначенный для преобразования напряжения сети ![]() в
напряжение другой величины и (или) частоты.
в
напряжение другой величины и (или) частоты.
На практике используются электромашинные преобразователи, управляемые
выпрямители, преобразователи частоты, коммутаторы напряжения. В простейшем ЭП
силовой преобразователь может отсутствовать. В этом случае электродвигатель
получает энергию непосредственно от сети.
3) Механическое передаточное устройство МПУ, предназначенное для передачи механической энергии от двигателя к рабочему механизму;
Виды МПУ: редуктор, винт - гайка, барабан - трос, ременная передача, зубчато-реечная передача, кривошипно-шатунный механизм, электромагнитные муфты.
4) Управляющее устройство, предназначенное для формирования управляющих воздействий в электроприводе. В качестве такового используются релейные схемы управления, регуляторы, микропроцессорные средства управления.
5) Датчики обратных связей по регулируемым координатам или возмущениям.
б) по виду движения
1. Эп вращательного движения – обеспечивает вращательное движение
исполнительного органа рабочей машины;
2. ЭП поступательного движения - обеспечивает поступательное линейное
движение исполнительного органа рабочей машины;
3. ЭП возвратно-поступательного (вибрационного) движения -
обеспечивает возвратно-поступательное (вибрационное) движение исполнительного
органа рабочего механизма;
4.ЭП непрерывного движения - обеспечивает непрерывное движение
исполнительного органа рабочей машины;
5. ЭП дискретного движения - обеспечивает дискретное перемещение
исполнительного органа рабочей машины;
6. Реверсивный ЭП – обеспечивает движение исполнительного органа
рабочей машины в любом из двух противоположных направлений;
7. Нереверсивный ЭП - обеспечивает движение исполнительного органа
рабочей машины только в одном направлении;
8. Моментный ЭП – обеспечивает заданный момент или усилие на
исполнительном органе рабочей машины.
2.Вопрос
в) по наличию и
характеру передаточного устройства
1. Редукторный ЭП – в котором передача механической энергии от
двигателя к исполнительному органу рабочей машины осуществляется посредством
редуктора;
2. Безредукторный ЭП - в котором передача механической энергии от
двигателя к исполнительному органу рабочей машины осуществляется либо
непосредственно, либо через передаточное устройство, не содержащее редуктор.
г) по степени важности выполняемых операций
1. Главный ЭП - обеспечивает движение двигателя к исполнительному
органу рабочей машины, выполняющего главную технологическую операцию;
2. Вспомогательный ЭП - обеспечивает движение исполнительного органа
рабочей машины, выполняющего вспомогательную технологическую операцию.
д) по роду тока
1. ЭП постоянного тока;
2. ЭП переменного тока.
е) по виду силового преобразователя
1. ЭП с электромашинным преобразователем;
2. ЭП с полупроводниковыми преобразователями. Последние, в свою
очередь, делят на транзисторные преобразователи и тиристорные
преобразователи.
ж) по виду электрического двигателя
1. ЭП с двигателем постоянного тока;
2. Асинхронный ЭП;
3. Синхронный ЭП;
4. ЭП с шаговыми двигателями.
3. Вопрос
з)
по степени управляемости движения
1. Нерегулируемый ЭП – параметры движения исполнительного органа
рабочей машины изменяются только из-за возмущающих воздействий. В качестве
нерегулируемых используются электроприводы с асинхронными короткозамкнутыми
двигателями и релейно-контакторными устройствами пуска и торможения;
2. Регулируемый ЭП - параметры движения исполнительного органа
рабочего механизма могут изменяться под воздействием управляющего устройства.
и) по степени автоматизации
1. Неавтоматизированный ЭП – в котором все операции управления
выполняет человек (оператор);
2. Автоматизированный ЭП - часть операций управления в котором
выполняют соответствующие устройства управления без участия оператора;
3. Автоматический ЭП – все операции управления вырабатываются
автоматически действующим устройством (регулятором) без участия оператора.
Например, ЭП промышленных манипуляторов и роботов.
к) по принципу управления
1. ЭП с разомкнутой системой управления – ЭП, в котором отсутствует
обратная связь по регулируемой координате или по возмущению;
2. ЭП с замкнутой системой управления – ЭП, в котором имеется
обратная связь по регулируемой координате или по возмущению.
л) по задаче управления
1. Программно-управляемый ЭП – в котором параметры движения
исполнительного органа рабочей машины регулируются во времени в соответствии с
заданной программой;
2. Следящий ЭП - в котором параметры движения исполнительного органа
рабочей машины регулируются во времени в соответствии с произвольно меняющимся
сигналом управления;
3. Позиционный ЭП – в котором регулируется положение (угловое или
линейное) исполнительного органа рабочей машины;
4. Адаптивный ЭП – автоматически изменяющий структуру и/или параметры
системы управления с целью сохранения заданных показателей качества
функционирования при изменении условий функционирования (возмущающих
воздействий) в широких пределах.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.