Федеральное агентство по образованию
Государственное образовательное учреждение
высшего профессионального образования
Омский Государственный Технический Университет
Кафедра: «ЭсПП»
Дисциплина: «Электрический привод»
Отчёт по лабораторной работе №2
«МОДЕЛИРОВАНИЕ ЭЛЕКТРОПРИВОДОВ ПОСТОЯННОГО ТОКА
С «П» и «ПИ» – РЕГУЛЯТОРАМИ СКОРОСТИ И ИДЕАЛЬНЫМ УСИЛИТЕЛЕМ МОЩНОСТИ»
Вариант № 6
Выполнил: студент гр. Э – 414
Хапилин Д.В.
Проверил: старший преподаватель, к.т.н.
Катрич П.А.
Омск 2008
Цель работы: изучение принципа действия, статических и динамических свойств регулируемого электропривода при различных настройках регуляторов.
ОПИСАНИЕ ИССЛЕДУЕМЫХ ЭЛЕКТРОПРИВОДОВ
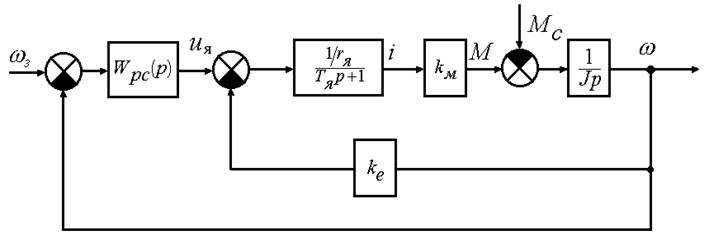 |
Рис. 1.
здесь ![]() –
сопротивление и ток якорной цепи;
–
сопротивление и ток якорной цепи;
![]() – угловая скорость вала двигателя;
– угловая скорость вала двигателя;
![]() – момент нагрузки;
– момент нагрузки;
![]() – электромагнитная постоянная времени;
– электромагнитная постоянная времени;
![]() – конструктивный коэффициент;
– конструктивный коэффициент;
![]() – заданная скорость двигателя;
– заданная скорость двигателя;
![]() – передаточная функция регулятора
скорости. Это звено совмещает регулятор и идеальный усилитель мощности.
– передаточная функция регулятора
скорости. Это звено совмещает регулятор и идеальный усилитель мощности.
В случае П-регулятора:
![]() ;
;
 |
Рис. 2.
Передаточная функция ПИ – регулятора имеет вид:
 ;
;
Изображение скорости для привода с П-регулятором:
 ;(1)
;(1)
здесь  − электромеханическая постоянная времени
двигателя.
− электромеханическая постоянная времени
двигателя.
По (1) рассчитываются переходные процессы в системе и отсюда же следует выражения механической характеристики электропривода.
 .
(2)
.
(2)
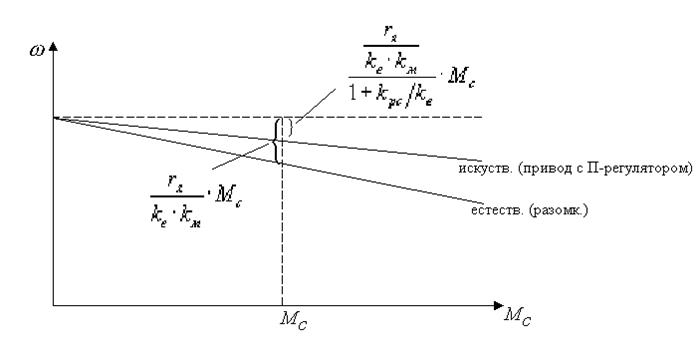 |
Рис.3
Величина статической ошибки:
 . (3)
. (3)
Ее можно уменьшить путем увеличения коэффициента усиления регулятора скорости kpc кроме того, увеличение kpc вызывает ускорение (до определенных пределов) протекания переходных процессов. Однако вместе с этим меняется и вид переходных процессов. Если у исследуемого двигателя
![]() ,
,
то апериодический переходный процесс обеспечивается при
 ,
(4)
,
(4)
а колебательный переходный процесс – при
 .
(5)
.
(5)
Недостаток привода с П-регулятором – наличие статической ошибки по скорости, которую можно устранить введением в систему ПИ – регулятора. В этом случае изображение по скорости имеет вид:

 . (6)
. (6)
Из (6) следует, что система обладает астатизмом 1-го порядка относительно задающего воздействия и возмущения.
В отличие от привода с П – регулятором данный привод не сохраняет устойчивость при увеличении коэффициентов усиления ПИ – регулятора kpc, kи.
Для устойчивости системы необходимо
 .
(7)
.
(7)
Моделирование исследуемых электроприводов на ЭВМ производится с помощью приложения «SIMULINK» из состава пакета «MATLAB».
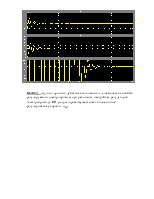
Структурная схема электропривода с П-регулятором и идеальным усилителем мощности приведена на рис. 4.
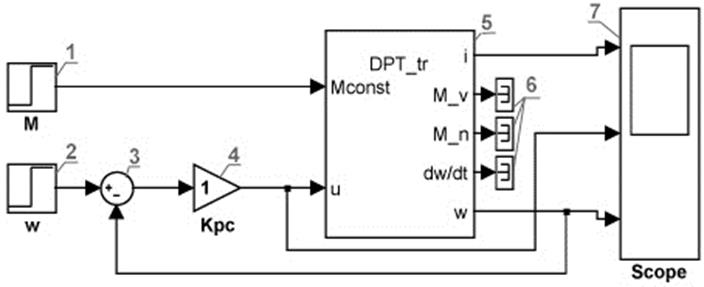
Рис. 4.
Структурная схема состоит из следующих блоков:
1 и 2 – генераторы ступенчатого сигнала;
3 – сумматор;
4 – усилитель;
5 – модель ДПТ;
6 – терминаторы;
7 – виртуальный осциллограф.
Структурная схема электропривода с ПИ – регулятором и идеальным усилителем мощности приведена на рис. 5.
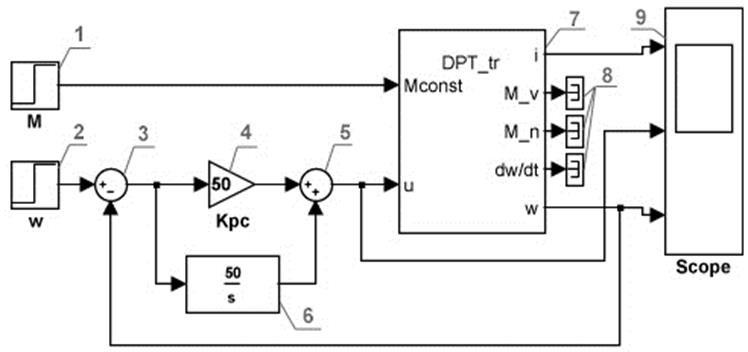
Рис. 5.
Структурная схема состоит из следующих блоков:
1 и 2 – генераторы ступенчатого сигнала;
3 и 5 – сумматоры;
4 – усилитель;
6 – интегратор;
7 – модель ДПТ;
8 – терминаторы;
9 – виртуальный осциллогораф.
РАБОЧЕЕ ЗАДАНИЕ
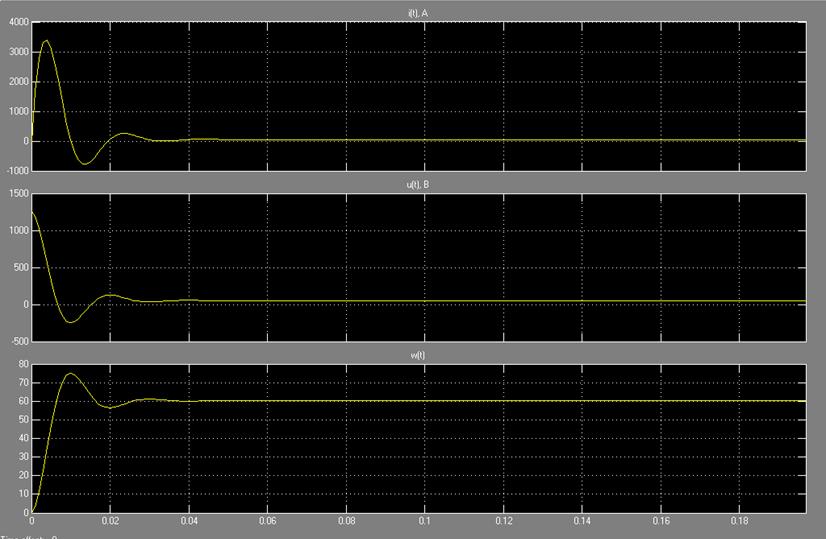
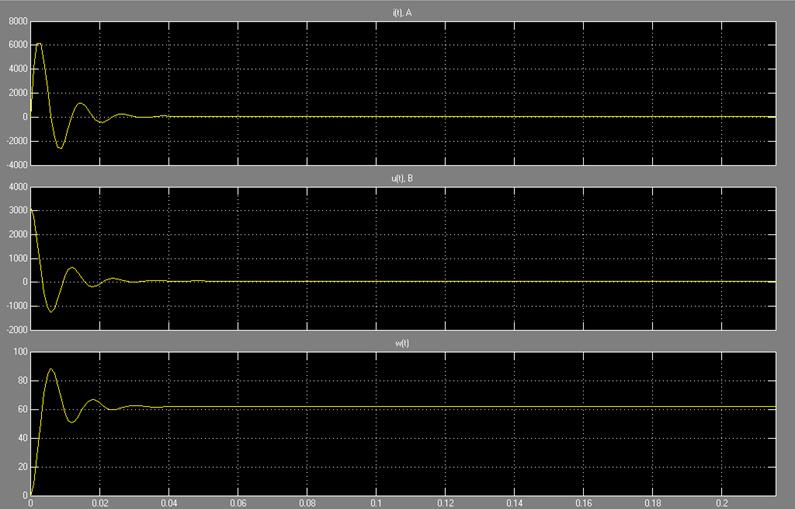
1. Для привода с П-регулятором (kрс=20; kрс=50) рассчитать величины ωуст , Хуст, результаты расчетов занести в таблицу 1. Исследовать процессы отработки ступенчатого задающего воздействия и наброса нагрузки, контролируя величины Uя(t), iя(t), ω(t). Постройте графики этих величин. Определите значения максимальной величины скорости ωmax, перерегулирование σ, установившееся значение скорости ωуст, время регулирования tp. Результаты занесите в таблицу 1.
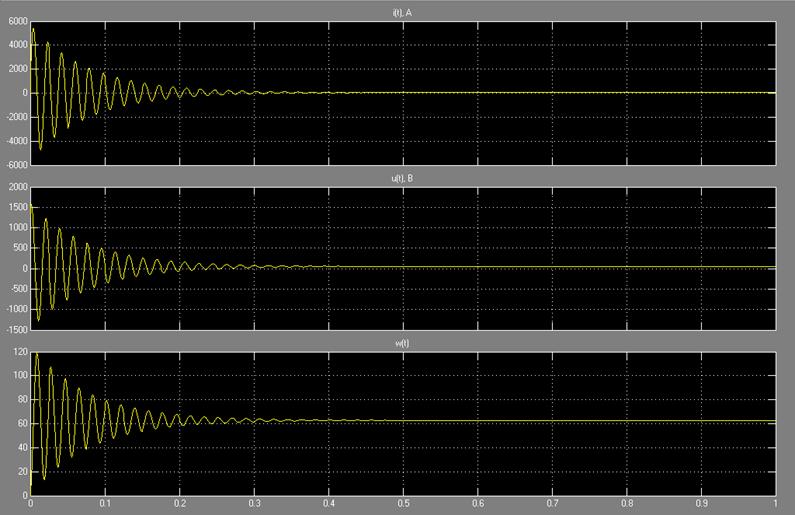
2. Для привода с ПИ – регулятором и величин kрс=20; kрс=50 рассчитать величину kи, обеспечивающую устойчивость привода (формула (7)). Повторите исследования по пункту 1. Результаты занесите в таблицу 2.
Таблица 1. Исследование привода с П –регулятором.
|
Мс, Н∙м |
kрс |
ωmax, с-1 |
σ,% |
Хуст, с-1 |
ωуст расч., с-1 |
ωуст мод., с-1 |
tр, с |
|
35 |
20 |
75,15 |
2,561 |
60,239 |
60,2391 |
0,06 |
|
|
35 |
50 |
88,3 |
1,046 |
61,754 |
61,7548 |
0,05 |
Таблица 2. Исследование привода с ПИ – регулятором.
|
Мс, Н∙м |
kрс |
ωmax, с-1 |
σ,% |
Хуст, с-1 |
ωуст расч., с-1 |
ωуст мод., с-1 |
tр, с |
|
35 |
20 |
120 |
2,561 |
60,239 |
62,8 |
0,85 |
|
|
35 |
50 |
120 |
1,046 |
61,754 |
62,8 |
0,80 |
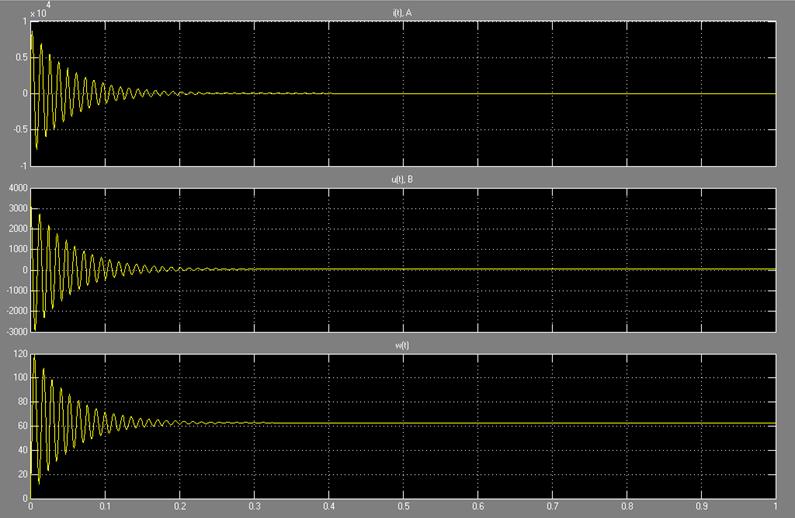
Для П – регулятора.
Крс=20:
Крс=50:
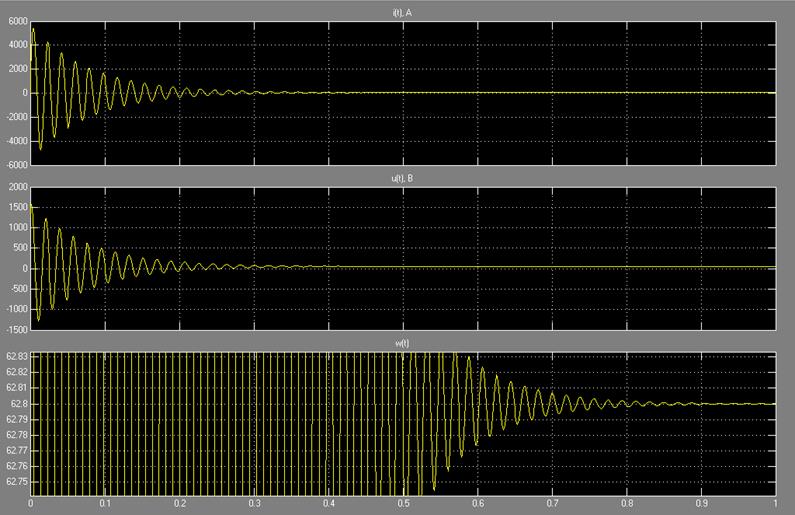
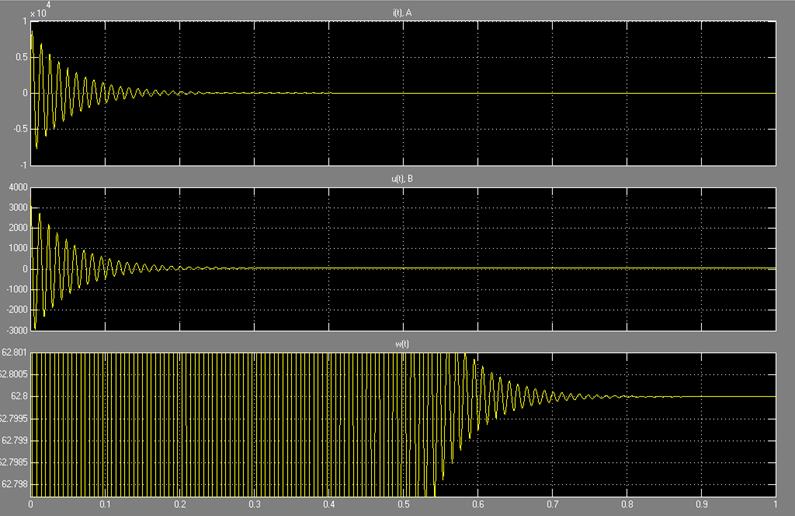
Для ПИ – регулятора.
Крс=20 (Ки=5000):
Крс=50 (Ки=12000):
ВЫВОД: изучили принцип действия статических и динамических свойств регулируемого электропривода при различных настройках регуляторов.
Электропривод с ПИ- регулятором осуществляет более точное регулирование скорости ωуст.
ЛИТЕРАТУРА.
1. Михайлов О.П. Автоматизированный электропривод станков и промышленных роботов. – М.: Машиностроение, 1990.
2. Зимин Е.Н., Яковлев В.И. Автоматическое управление электроприводами. – М.: Высшая школа, 1979.
3. Справочник по автоматизированному электроприводу / Под ред. В.А. Елисеева. – М.: Энергоатомиздат, 1983.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.