Федеральное агентство по образованию
Государственное образовательное учреждение
высшего профессионального образования
Омский Государственный Технический Университет
Кафедра: «ЭсПП»
Дисциплина: «Электропривод»
Отчёт по лабораторной работе №3
МОДЕЛИРОВАНИЕ ЭЛЕКТРОПРИВОДОВ ПОСТОЯННОГО ТОКА
С (П и ПИ)-РЕГУЛЯТОРАМИ СКОРОСТИ
И ТРАНЗИСТОРНЫМ ШИРОТНО-ИМПУЛЬСНЫМ ПРЕОБРАЗОВАТЕЛЕМ
Вариант №6
Выполнил: студент группы Э – 414
Хапилин Д.В.
Проверил: к.т.н., старший преподаватель
Катрич П.А.
Омск 2008
Цель работы: изучение принципа действия, статических и динамических свойств тиристорного электропривода с широтно-импульсным преобразователем.
ОПИСАНИЕ ИССЛЕДУЕМЫХ ЭЛЕКТРОПРИВОДОВ.
Структурная схема электропривода приведена на рис. 1.
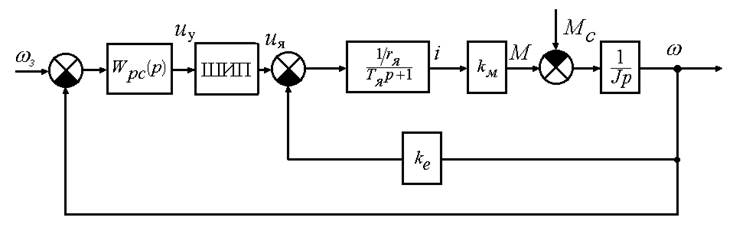
Рис. 1
Здесь
![]() – сопротивление и ток якорной цепи;
– сопротивление и ток якорной цепи;
![]() – угловая скорость вала
двигателя;
– угловая скорость вала
двигателя;
![]() – момент нагрузки;
– момент нагрузки;
![]() – электромагнитная
постоянная времени;
– электромагнитная
постоянная времени;
![]() – конструктивный
коэффициент;
– конструктивный
коэффициент;
![]() – заданная скорость
двигателя;
– заданная скорость
двигателя;
![]() – передаточная функция
регулятора скорости.
– передаточная функция
регулятора скорости.
В случае П – регулятора
![]() ,
,
В случае ПИ – регулятора
 .
.
В электроприводах постоянного тока в качестве силовых преобразователей широко используются широтно-импульсные преобразователи (ШИП) неизменного напряжения постоянного тока в регулируемое напряжение постоянного тока. Функционально ШИП состоит из двух частей: широтно-импульсного модулятора (ШИМ) и вентильного (транзисторного) коммутатора ВК – рис.2.
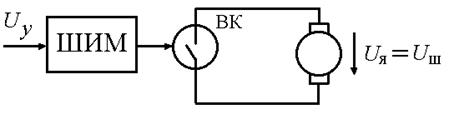
Рис. 2
В зависимости от полярности выходного напряжения ШИП делятся на однополярные и двуполярные (рис. 3).
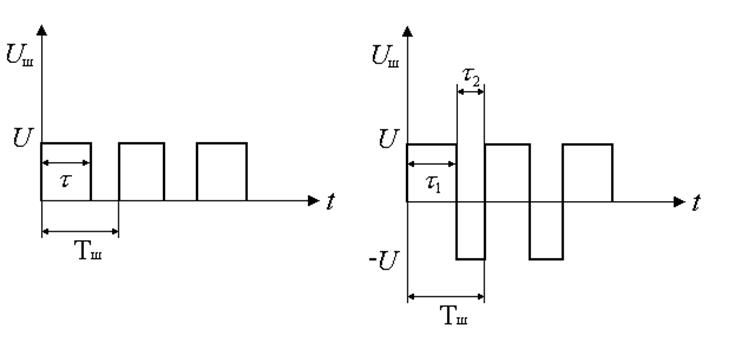
Рис. 3
Выбор однополярного или разнополярного выходного напряжения определяется необходимостью изменения направления вращения вала двигателя.
Рассмотрим работу однополярного ШИМ – модулятора, который можно представить как некоторый безынерционный усилитель среднего значения выходного импульсного напряжения – рис. 4.
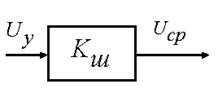
Рис. 4
Для него справедливо:
![]() ,
(1)
,
(1)
где:
![]() – напряжение управления (входное
напряжение ШИМ – модулятора).
– напряжение управления (входное
напряжение ШИМ – модулятора).
 среднее
значение выходного напряжения ШИМ, (2)
среднее
значение выходного напряжения ШИМ, (2)
![]() – амплитуда выходных импульсов ШИМ.
– амплитуда выходных импульсов ШИМ.![]()
![]() – коэффициент передачи по среднему
значению.
– коэффициент передачи по среднему
значению.
Величина ![]() зависит от конкретной
реализации широтно-импульсного модулятора.
зависит от конкретной
реализации широтно-импульсного модулятора.
Рассмотрим работу ШИМ – модулятора, выполненного по структурной схеме – рис.5.
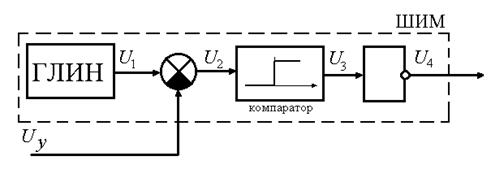
Рис. 5
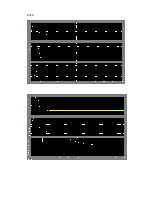
Временные диаграммы, иллюстрирующие работу ШИМ, приведены на рис.6.
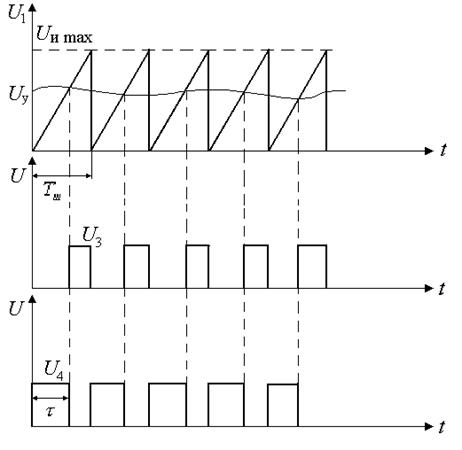 |
Из рис. 6.:
 ,
(3)
,
(3)
где
![]() – максимальное выходное напряжение
генератора линейно-изменяющегося напряжения (ГЛИН).
– максимальное выходное напряжение
генератора линейно-изменяющегося напряжения (ГЛИН).
Отсюда:
 .
(4)
.
(4)
Тогда:
 .
(5)
.
(5)
Окончательно
 .
(6)
.
(6)
Выходное импульсное напряжение ШИП подается на обмотку якоря двигателя. Импульсное регулирование напряжения сопровождается пульсациями тока якоря – рис. 7.
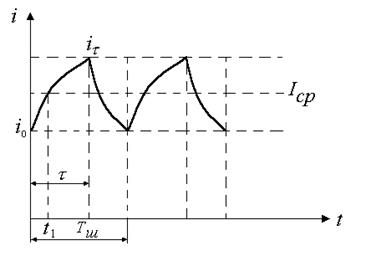
Рис. 7
Размах пульсаций тока
![]()
зависит
от соотношения ![]() и величины среднего тока
и величины среднего тока
 .
.
Как правило, требуется, чтобы
![]() > 10,
> 10,
то есть размах колебаний составлял не более 10 % от среднего значения.
Обозначим
![]() .
(7)
.
(7)
При
каком соотношении ![]() обеспечивается заданная величина
обеспечивается заданная величина
![]() ?
?
Точное аналитическое решение данной задачи затруднено.
Решим ее приближенно, для чего заменим на интервале ![]() экспоненциальную
форму тока прямолинейной.
экспоненциальную
форму тока прямолинейной.
Тогда
 ,
(8)
,
(8)
Дифференциальное уравнение, описывающее цепь якоря двигателя:
 , (9)
, (9)
откуда:
 .
(10)
.
(10)
Очевидно,
что при ![]() величина
величина
 ,
(11)
,
(11)
тогда:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.