 .
(12)
.
(12)
 .
.
Отсюда:
 .
(13)
.
(13)
 . (14)
. (14)
 .
(15)
.
(15)
Полученное
выражение (15) позволяет определить период выходного напряжения ШИМ –
модулятора в зависимости от заданной величины пульсаций тока якоря ![]() и электромагнитной постоянной Тя.
и электромагнитной постоянной Тя.
Моделирование исследуемых электроприводов на ЭВМ производится с помощью приложения «Simulink» из состава пакета «MatLab».
Структурная схема электропривода с П-регулятором и ШИМ-модулятором приведена на рис. 8.
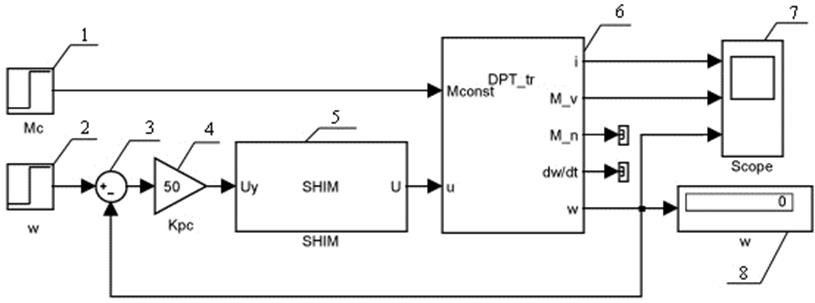
Рис. 8
Блоки 1 и 2 служат для задания момента нагрузки Мн и скорости вращения ωз соответственно. Блок 4 реализует пропорциональный регулятор с коэффициентом усиления kрс. Подсистема 5 моделирует работу широтно-импульсного преобразователя. Подсистема 6 представляет собой модель двигателя постоянного тока. Виртуальный осциллограф 7 и измерительный прибор 8 служат для отображения результатов моделирования.
Структурная схема электропривода с ПИ-регулятором и ШИМ-модулятором приведена на рис. 9.
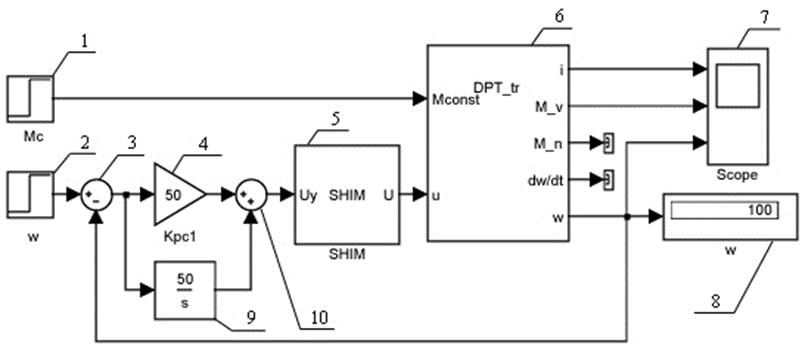
Рис. 9
ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ
1. Для заданных параметров двигателя
рассчитать теоретическую зависимость ![]() по выражению (15).
Результаты расчетов занести в таблицу 2.
по выражению (15).
Результаты расчетов занести в таблицу 2.
Таблица 2
|
Tя/Тш |
1 |
2 |
4 |
8 |
10 |
15 |
20 |
25 |
|
a, расчет |
0,342 |
0,683 |
1,366 |
2,732 |
3,415 |
5,123 |
6,83 |
8,538 |
|
a, модель |
0,362 |
0,775 |
1,453 |
2,907 |
3,881 |
5,815 |
7,291 |
9,72 |
2. Экспериментально определить
зависимость ![]() с помощью модели. Результаты занести в
таблицу 1.
с помощью модели. Результаты занести в
таблицу 1.
3. Построить графики ![]() (теоретическую и экспериментальную
зависимости).
(теоретическую и экспериментальную
зависимости).
Рис.10
4.
Для привода с П-регулятором (![]() ), , и заданной
величины а исследовать процессы отработки ступенчатого задающего
воздействия, контролируя величины
), , и заданной
величины а исследовать процессы отработки ступенчатого задающего
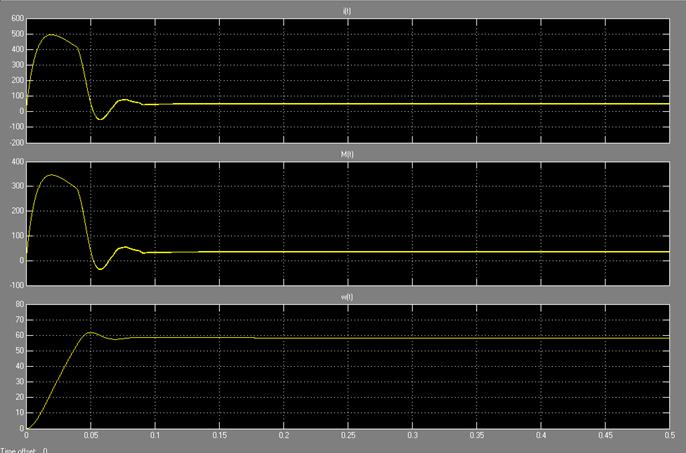
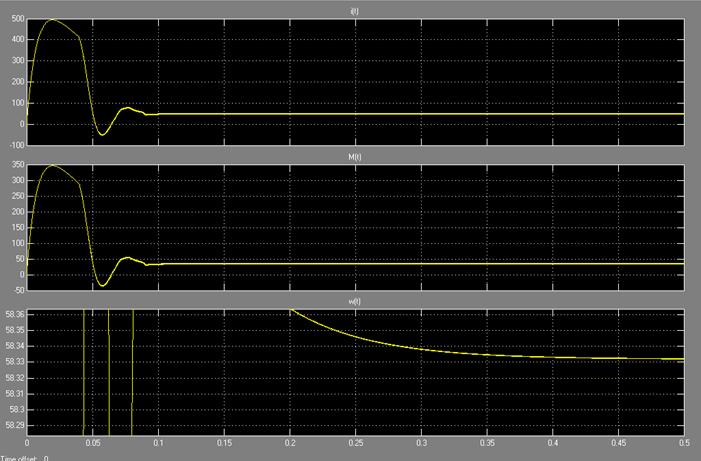
воздействия, контролируя величины ![]() . Нарисовать графики
этих величин. Определите значения максимальной величины скорости ωmax, перерегулирование σ, установившееся значение скорости ωуст,
время регулирования tp. Результаты занести в таблицу 3.
. Нарисовать графики
этих величин. Определите значения максимальной величины скорости ωmax, перерегулирование σ, установившееся значение скорости ωуст,
время регулирования tp. Результаты занести в таблицу 3.
К=20
К=50
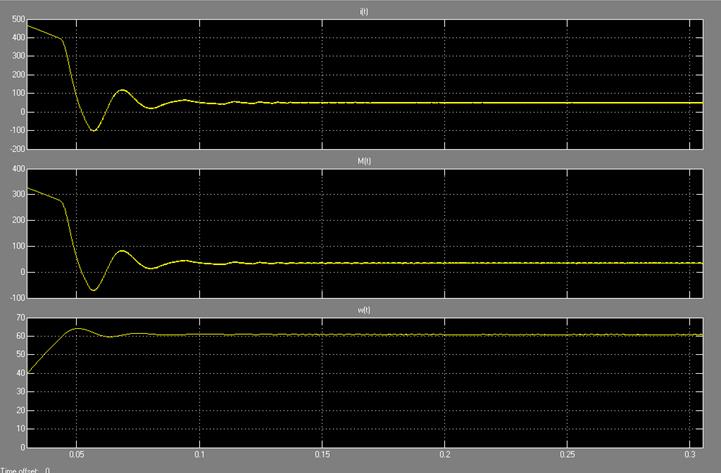
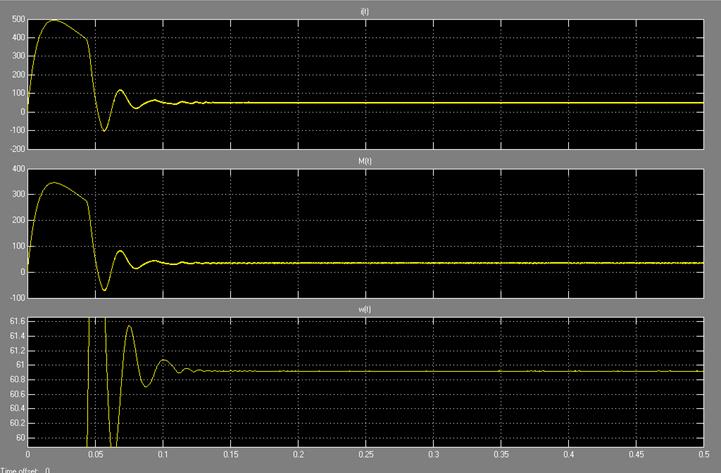
Таблица 3 – Исследование привода с П-регулятором.
|
Мс, Н∙м |
kpc |
ωmax, c-1 |
σ, % |
ωуст, c-1 |
tp, с |
|
35 |
20 |
62,5 |
7,14 |
58,333 |
0,45 |
|
35 |
50 |
65 |
6,73 |
60,9 |
0,2 |
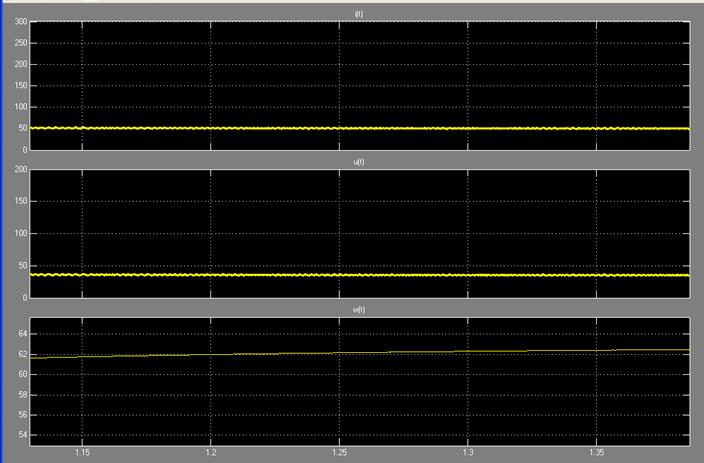
5. Для привода с ПИ-регулятором (![]() ), , и заданной величины а
исследовать процессы отработки ступенчатого задающего воздействия, контролируя
величины
), , и заданной величины а
исследовать процессы отработки ступенчатого задающего воздействия, контролируя
величины ![]() . Нарисовать графики этих величин.
Определите значения максимальной величины скорости ωmax, перерегулирование σ, установившееся значение скорости ωуст,
время регулирования tp. Результаты занести в таблицу 4.
. Нарисовать графики этих величин.
Определите значения максимальной величины скорости ωmax, перерегулирование σ, установившееся значение скорости ωуст,
время регулирования tp. Результаты занести в таблицу 4.
К=20, Ки=100
К=50, Ки=100
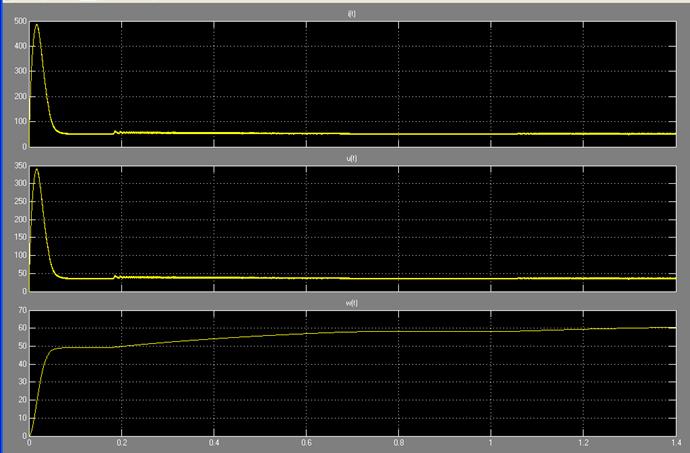
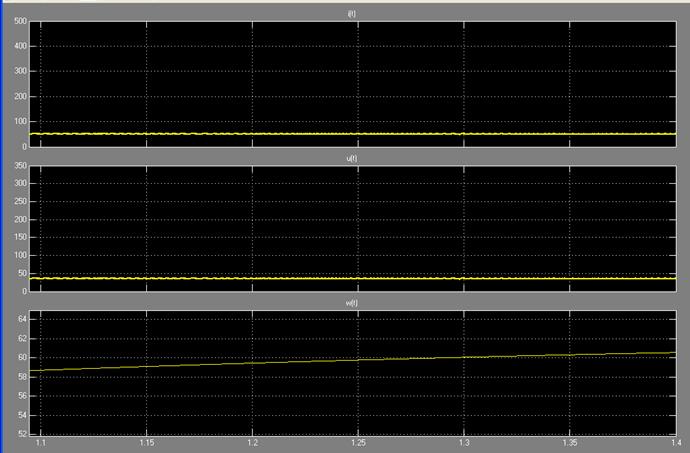
Таблица 4 – Исследование привода с ПИ-регулятором.
|
Мс, Н∙м |
kpc |
ωmax, c-1 |
σ, % |
ωуст, c-1 |
tp, с |
|
35 |
20 |
62,5 |
0 |
62,5 |
1,4 |
|
35 |
50 |
60,5 |
0 |
60,5 |
1,35 |
Вывод: изучили принцип действия, статических и динамических свойств тиристорного электропривода с широтно-импульсным преобразователем. Привод с ПИ – регулятором осуществляет более точное и качественное регулирование (ошибка регулирование и перерегулирование отсутствуют).
ЛИТЕРАТУРА.
1. Михайлов О.П. Автоматизированный электропривод станков и промышленных роботов. – М.: Машиностроение, 1990.
2. Зимин Е.Н., Яковлев В.И. Автоматическое управление электроприводами. – М.: Высшая школа, 1979.
3. Справочник по автоматизированному электроприводу/Под ред. В.А. Елисеева. – М.: Энергоатомиздат, 1983.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.