|
ω, рад/с |
4,9 |
5,3 |
5,7 |
6,1 |
6,5 |
6,9 |
7,3 |
7,7 |
|
Pоб(ω) |
-0,9477 |
-0,3991 |
0,24222 |
0,69595 |
0,796 |
0,54303 |
0,08435 |
-0,363 |
|
Qоб(ω) |
0,01173 |
0,27255 |
0,36674 |
0,28187 |
0,08307 |
-0,1263 |
-0,253 |
-0,2521 |
|
Pp(ω) |
0,1255 |
0,1255 |
0,1255 |
0,1255 |
0,1255 |
0,1255 |
0,1255 |
0,1255 |
|
Qp(ω) |
0,33786 |
0,36704 |
0,39612 |
0,4251 |
0,45402 |
0,48288 |
0,51169 |
0,54046 |
|
Pраз(ω) |
-0,1229 |
-0,1501 |
-0,1149 |
-0,0325 |
0,06218 |
0,12912 |
0,14006 |
0,09068 |
|
Qраз(ω) |
-0,3187 |
-0,1123 |
0,14197 |
0,33123 |
0,37183 |
0,24637 |
0,01141 |
-0,2278 |
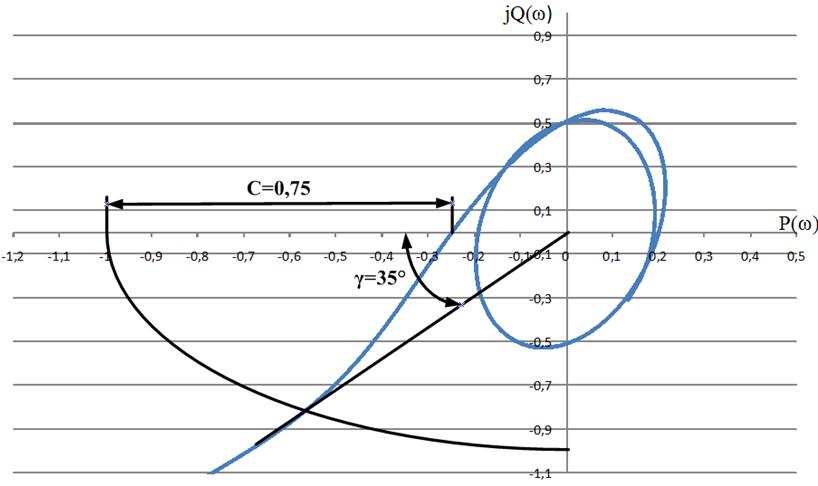
Рисунок 19– АФХ разомкнутой системы
Годограф Найквиста не охватывает точку (-1; j0) на комплексной плоскости, поэтому система в замкнутом состоянии устойчива и имеет значительный запас устойчивости по амплитуде С = 0,75 и по фазе Δγ = 35 °.
3.5 Проверка настроек регулятора на оптимальность
Рассчитанные оптимальные настройки ПИД-регулятора, проверим на оптимальность. Для этого увеличим и уменьшим настройки ПИД-регулятора, а именно, Кп, Ки, Кд на 20 % и посмотрим как изменится переходной процесс. Данные сводим в таблицу 11.
Таблица 11 – Оптимальные и измененные настройки ПИД-регулятора
|
Настройки ПИД-регулятора |
Оптимальные настройки |
Настройки, увеличенные на 20 % |
Настройки, уменьшенные на 20 % |
|
Кп |
0,148 |
0,1776 |
0,1184 |
|
Ки |
0,0633 |
0,07596 |
0,05064 |
|
Кд |
0,0975 |
0,117 |
0,078 |
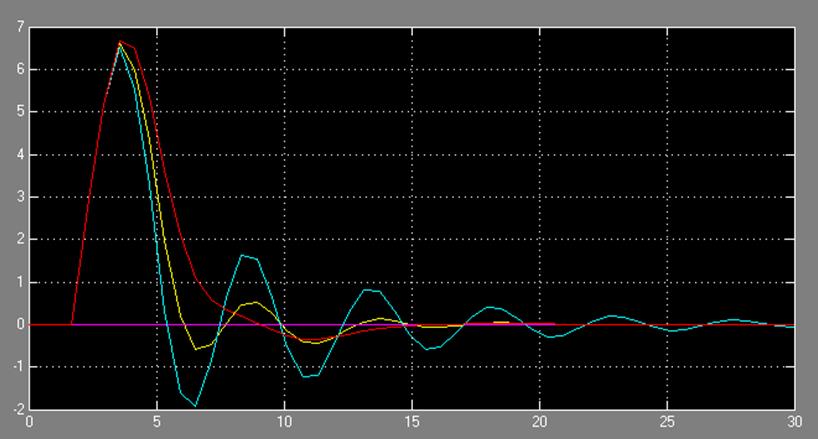
Переходные процессы, построенные в ПП MATLAB при оптимальных, увеличенных и уменьшенных настройках ПИД-регулятора, показаны на рисунке 20.
∆Q(t), м3/ч
t,c
1 − с оптимальными настройками, 2 − при увеличенными на 20% настройками,
3 − с уменьшенными на 20% настройками
Рисунок 20 – Проверка настроек ПИД-регулятора на оптимальность
Определим показатели качества полученных процессов, для удобства их восприятия полученные данные сведем в таблицу 12.
Таблица 12 – Сравнительный анализ показателей качества
|
Показатели качества |
Переходной процесс |
||
|
с оптимальными настройками |
с увеличенными на 20 % |
с уменьшенными на 20 % |
|
|
Максимальное динамическое отклонение ΔQ1, м3/ч |
6,7 |
6,5 |
6,6 |
|
Величина перерегулирования η, % |
4,48 |
24,6 |
7,6 |
|
Статическая ошибка ΔQст, % |
0 |
0 |
0 |
|
Время регулирования tр, с |
13 |
30 |
15 |
Анализ полученных результатов показывает, что переходной процесс с оптимальными настройками лучше, чем с увеличенными и уменьшенными настройками, так как при изменении настроек ПИД-регулятора ухудшаются показатели качества, а именно, увеличивается время регулирования и перерегулирование.
3.6 Построение переходного процесса АСР расхода сжатого воздуха при возмущении по заданию
Для построения переходного процесса по заданию также воспользуемся ПП MATLAB 7, а именно пакетом «Simulink». В созданной ранее АСР изменим возмущение, по нагрузке значение установим на 0, а по заданию 1. Переходной процесс полученный по заданию представлен на рисунке 21.
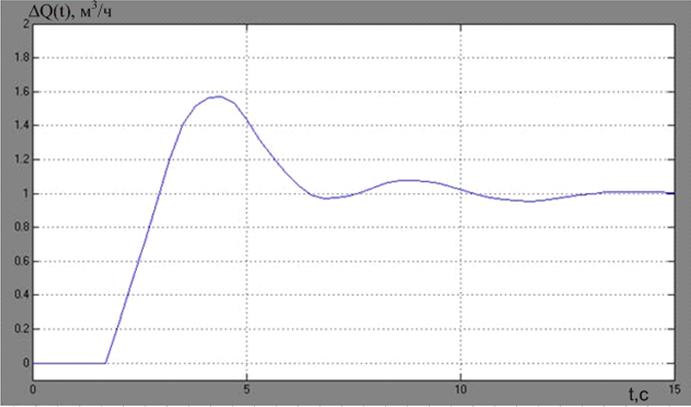
Рисунок 21 – Переходной процесс в системе при возмущении по заданию
Параметры переходного процесса в этом случае будут следующими:
- максимальное динамическое отклонение: ΔQ1 = 1,58 м3/ч;
- величина перерегулирования: η = 58 %;
- статическая ошибка: ΔQст = 0;
- время регулирования: tр = 13 с.
3.7 Проверка АСР расхода сжатого воздуха на грубость
Зачастую параметры объекта управления изменяются во времени или определены с ошибкой. Анализ флотомашины показал, что объект является многосвязным, характеристики объекта зависят от режима работы установки, характеристик сырья и других, часто наблюдаемых возмущений.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.