Для построения переходного процесса по заданию и расчёта оптимальных настроек регулятора воспользуемся программным продуктом MATLAB 7 и пакетом «Control System Toolbox», который является одним из основных инструментариев разработчика систем управления в среде MATLAB 7. Это сборник алгоритмов MATLAB для моделирования, анализа и проектирования систем управления. В пакете используются как традиционные методы теории автоматического регулирования с использованием передаточных функций, так и современные методы с использованием пространства состояния. В среде «Control System Toolbox» можно моделировать и анализировать как непрерывные, так и дискретные СУ. Легко могут быть вычислены и отображены на экране отклики системы в частотной и временной областях, диаграммы расположения нулей/полюсов.
Основные свойства пакета «Control System».
Формы представления:
- непрерывные и дискретные СУ;
- форматы моделей: передаточные функции (TF), пространство состояний (SS), нули-полюса (ZPK);
- построение линейных моделей СУ;
- преобразование моделей в различные форматы: ПФ, НП, ПС.
Возможности анализа:
- полный набор средств для анализа одно– (SISO) и многомерных (MIMO) систем;
- временные характеристики: переходная и импульсная переходная характеристики, реакция системы на произвольное воздействие;
- частотные характеристики: диаграммы Боде (АЧХ, ФЧХ), Найквиста и Никольса (АФХ) и др.
Возможности проектирования:
- расчет параметров обратной связи;
- проектирование линейно–квадратичных регуляторов (LQR);
- характеристики моделей: управляемость, наблюдаемость, понижение порядка модели;
- поддержка систем с запаздыванием.
Пакет «Control System Toolbox» часто используется совместно с другими пакетами MATLAB для проектирования более сложных СУ.
Для нахождения оптимальных настроек регулятора используем пакет «Simulink Response Optimization». В пакете «Simulink» создаём модель объекта (последовательно подключая пиктограммы – «Transfer Fcn» – передаточной функции и «Transport Delay» – запаздывания), присоединим блок «PID-Controller», на вход системы подаем ступенчатое воздействие, для этого подсоединим ко входу системы блок «Step», а к выходу подсоединяем блок графической оболочки оптимизации «Signal Constraint» и графический дисплей – блок «Scope», а также нам понадобится блок «Simout» для вывода данный в рабочее окно MatLAB. Схема собранная в пакете «Simulink» представлена на рисунке 16.
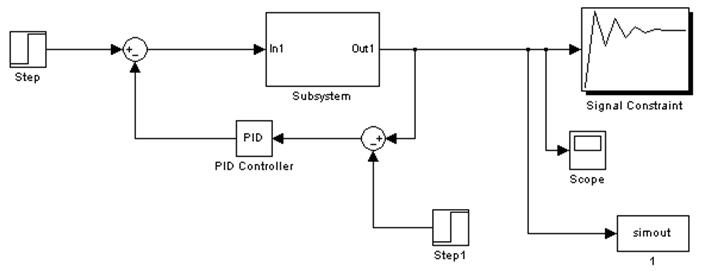
Рисунок 16 – Модель объекта управления собранная в пакете «Simulink»
Для оптимизации необходимы начальные значения коэффициентов составляющих ПИД-закона регулирования:
- коэффициент пропорциональной составляющей Кп = Кр= 0,135 м3/ч;
- коэффициент интегральной составляющей Ки= Кп/Ти = 0,039 м3/(ч·с);
- коэффициент дифференциальной составляющей Кд= Кп·Тд = 0,0924 м3·с/ч.
Переходной процесс с рассчитанными настройками ПИД-регулятора изображен на рисунке 17.
∆Q(t), м3/ч
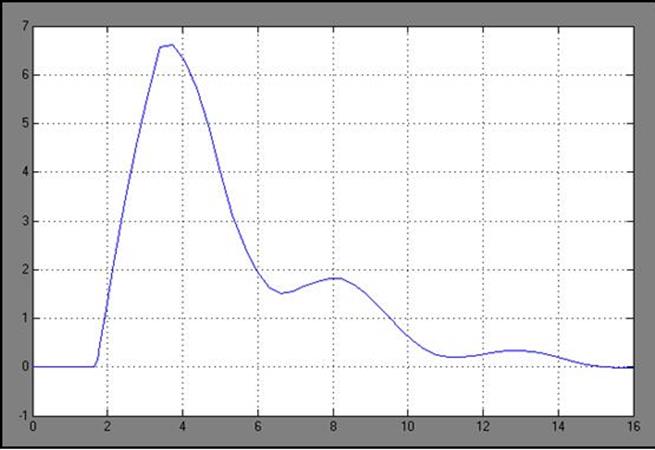
t,с
Рисунок 17 – Переходной процесс с рассчитанными настройками
ПИД-регулятора
Далее двойным щелчком мыши открываем окно «Block Parameters: Signal Constraint», на представленном поле задаем нужные требования к переходному процессу, путем передвижения красных границ. Следующим этапом наших действий будет указание в меню «Optimizations/Tuned Parametrs …» необходимых изменяемых параметров, а именно, в данном случае это рассчитанные ранее коэффициенты Kп, Kи, Kд ПИД-регулятора.
Следующим шагом проводим оптимизацию параметров, для этого нажимаем Start в меню «Optimizations», либо производим это нажатием мышкой по одноименной пиктограмме расположенной под главным меню окна «Block Parameters: Signal Constraint»
В результате проведенной оптимизации в окне «Optimization Progress» получаем оптимизированные параметры регулятора, а именно:
- коэффициент пропорциональной составляющей Kр=0,148 м3/ч;
- коэффициент интегральной составляющей Kи=0,0633 с или Ти= Кп/Ки=2,34 с;
- коэффициент дифференциальной составляющей Кд=0,0975 или Тд= Кд//Кп=0,659 с.
Переходной процесс с оптимальными настройками ПИД–регулятора изображен на рисунке 18.
∆Q(t), м3/ч
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.