Показатели качества регулирования, определяемые технологическим процессом: статическая ошибка ΔQст = 0, максимальное динамическое отклонение ΔQ1 ≤ 4,2 м3/ч; время регулирования tp ≤ 7 с; требуемый характер переходного процесса с 20 % перерегулированием.
3.1 Математическое описание объекта регулирования
Рассчитаем АСР расхода воздуха во флотомашину. Кривая разгона объекта представлена на рисунке 11. Расчёт ведем при максимальном внешнем возмущающем воздействии ΔХвх.mах = 5 % хода регулирующего органа (ХРО). Характеристика снята при скачкообразном возмущающем воздействии А=2 % ХРО.
На рисунке 11 показан график возмущающего воздействия.
|
Рисунок 11− График возмущающего воздействия X(t) |
Таблица 7− Исходные данные кривой разгона объекта, A=2 %ХРО
|
t, c |
0 |
1 |
2 |
4 |
6 |
8 |
10 |
12 |
|
∆Qв(t),м3/ч |
0,0 |
0,0 |
3,0 |
15,6 |
22,8 |
25,5 |
27,3 |
28,4 |
|
Рисунок 12 − Кривая разгона объекта управления |
Определяем единичную ΔQв0(t) и нормированную ΔQвн(t) переходные функции:
|
ΔQв0(t) = ΔQв (t) / A, |
(1) |
|
|
ΔQвН(t) = ΔQв0(t)/ ΔQв0(ty), |
(2) |
где А – cкачкообразное возмущающее воздействие, при котором снята переходная характеристика (А = 2 %); ΔQв0(ty) – установившееся значение переходной характеристики.
Установившееся значения ΔQв0(ty) определяем по таблице 8.
Таблица 8 – Значения единичной и нормированной переходных функций
|
t, c |
0 |
1 |
2 |
4 |
6 |
8 |
10 |
12 |
|
ΔQв (t), м3/ч |
0,0 |
0,0 |
3,0 |
15,6 |
22,8 |
25,5 |
27,3 |
28,4 |
|
ΔQв0(t),м3/ч/%ХРО |
0,0 |
0,0 |
1,5 |
7,8 |
11,4 |
12,75 |
13,65 |
14,2 |
|
ΔQвн(t), м3/ч |
0,00 |
0,00 |
0,106 |
0,549 |
0,803 |
0,898 |
0,961 |
1,00 |
|
ΔQв0(tу) = 14,2 м3/ч. |
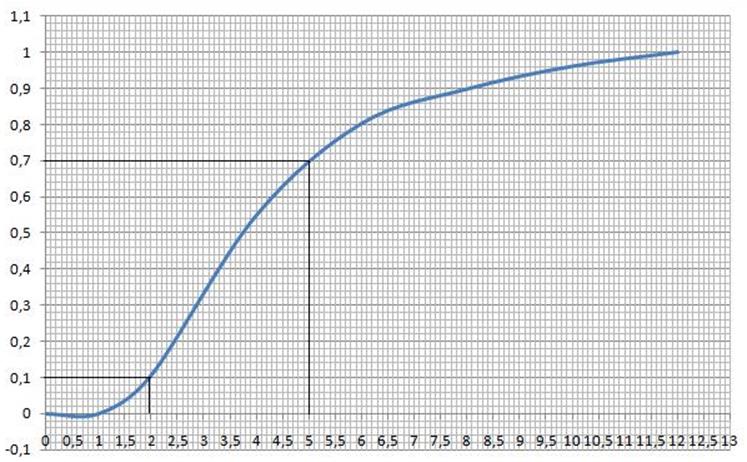
По данным таблицы 8 строим на одном графике (рисунок 13) переходные характеристики: нормированную и единичную.
ΔQвн(t) , м3/ч ΔQв0(t),м3/ч
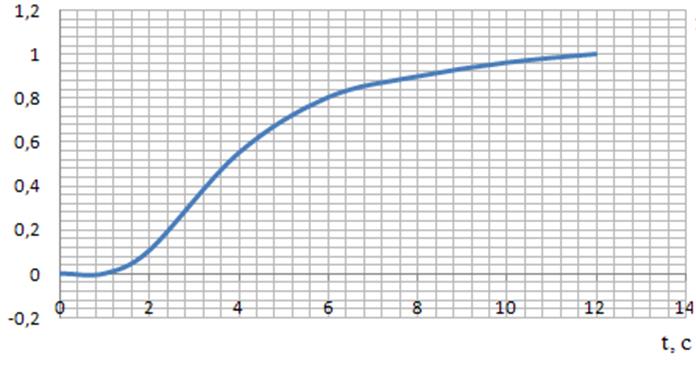
Рисунок 13 – Единичная DQв0(t) и нормированная DQвн(t) переходные
характеристики
Из зависимости ΔQв0(t) находим величину коэффициента усиления объекта Kоб:
|
Kоб= ΔQв0(ty)= 14,2 м3/ч. |
Далее определяем динамические характеристики объекта при аппроксимации его последовательным соединением апериодического звена и звена запаздывания: транспортное и дополнительное запаздывание, постоянную времени.
Транспортное запаздывание объекта определяется как отрезок времени (0;τ) на котором выполняется неравенство 0≤ΔQвн(t)≤Δ, где Δ=(0,01-0,02)Δ Qвн(ty), τ=1 с.
Дополнительное запаздывание τд находится по формуле
|
|
(3) |
где
(tБ, ![]() и (tА,
и (tА, ![]() − точки
пересечения аппроксимированной и
экспериментальной кривыми разгона,
− точки
пересечения аппроксимированной и
экспериментальной кривыми разгона, ![]() =0,1,
=0,1, ![]() =(0,7..0,85).
=(0,7..0,85).
Из tА, tБ исключено время транспортного запаздывания.
По нормированной переходной
характеристике (рисунок 14) графически
определим время tА и tБ для ![]() =0,1 и
=0,1 и ![]() =0,7
=0,7
|
tA=2-1=1 c; tБ=5-1=4 с. ΔQвн(t), м3/ч
t,с |
Рисунок 14 − Нормированная переходная характеристика
Находим дополнительное запаздывание:
|
|
Общее запаздывание объекта находим как сумму транспортного и дополнительного запаздывания:
|
|
(4) |
|
|
Постоянную времени объекта Тоб определяем по формуле:
|
|
(5) |
|
|
Таким образом, передаточная функция объекта имеет вид
|
|
(6) |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.