Если в основной цепи имеется
интегрирующее звено  , то регулятор
должен быть пропорциональным, причем
, то регулятор
должен быть пропорциональным, причем
 ;
; (4.3)
(4.3)
Где То = Т/ Кр; при Кр ® ¥ постоянная То может иметь любое, сколь угодно малое значение. После создания замкнутого контура
 (4.4.)
(4.4.)
Если последовательно с интегрирующим включено усилительное звено, то
При том же пропорциональном регуляторе
 (4.5.)
(4.5.)
Откуда для замкнутого контура
 или
или
 (4.6.)
(4.6.)
где 
Если исходное звено - апериодическое с передаточной функцией

то регулятор должен иметь передаточную функцию
 (4.7.)
(4.7.)
Тогда
 (4.8.)
(4.8.)
или после охвата обратной связью опять получаем
 (4.9.)
(4.9.)
При наличии в апериодическом звене некоторого коэффициента усиления, то есть при передаточной функции
аналогично получим
 (4.10.)
(4.10.)
Следовательно
 или (4.11.)
или (4.11.)
где
4.2. Реализация регуляторов на базе операционных
усилителей.
В системах подчиненного регулирования применяются регуляторы четырех типов:
-пропорциональные (П) с передаточной функцией; ![]()
- интегральные (И)
- пропорционально-интегральные (ПИ)
- пропорционально-интегро-дифференциальные (ПИД)

ПИД – регулятор бывает необходим при наличии двух больших постоянных времени, подлежащих компенсации, например, в контуре с колебательным звеном.
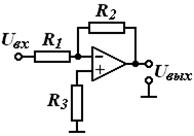
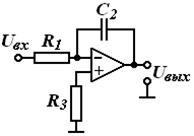
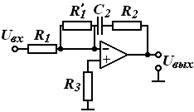
В табл. 4.1. показаны примеры схемной реализации указанных регуляторов на базе операционных усилителей.
Таблица 4.1
|
Тип регулятора |
П |
И |
ПИ |
ПИД |
|
Схемная реализация |
|
|
|
|
|
|
|
|
|
|
|
Связь W(p) с параметрами элементов |
|
|
|
|
Таким образом, при использовании перечисленных регуляторов получаем единообразную структуру системы.
4.3. Внутренний контур СПР на примере
контура тока ДПТ.
У двигателя постоянного тока из-за наличия внутренней обратной связи по ЭДС возникают неудобства при построении СПР. Обычно при построении СПР принимают упрощенную структурную схему, которой соответствует передаточная функция, отличающаяся от ранее рассмотренной (2.8.):
 (4.12.)
(4.12.)
При этом, естественно, вносится некоторая погрешность, которая в большинстве случаев не приводит к существенному искажению в расчете динамики привода.
Для контура тока в упрощенной структурной схеме двигателя (Рис. 4.2а) передаточная функция регулятора будет:
 (4.13.)
(4.13.)
результирующая функция
 (4.14.)
(4.14.)
где ТТ – эквивалентная постоянная токового контура, которая
Рис. 4.2 (а). Упрощенная структурная схема для контура тока в двигателе.
Рис. 4.2 (б). Реальная структурная схема.
ранее в общем виде была обозначена То.
Для реальной схемы при том же регуляторе (Рис. 4.2б)
 (4.15.)
(4.15.)
 (4.16.)
(4.16.)
Разделив (4.16.) на (4.14.) получим дополнительный поправочный множитель, учитывающий влияние ЭДС.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.