Случайная величина q на входе решающего устройства на рисунке 4.1 может быть представлена как
Вероятность
ошибки ![]() и
и ![]() определяется
как [10]
определяется
как [10]
|
|
(6.4) |
|
|
(6.5) |
где M - число ветвей.
Отношение
сигнал/шум ![]() ,
определяется как
,
определяется как
|
|
(6.6) |
где ![]() ,
, ![]() ,
, ![]() ,
, ![]() .
.
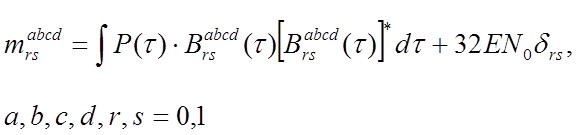
Момент ![]() определяется
как
определяется
как
|
|
(6.7) |
где
|
|
(6.8) |
|
|
Если представить

Таким образом, выражение (4.8) можно привести к
|
|
(6.9) |
Учитывая, как показано в [22], частотно-корреляционная функция имеет Гауссовский характер:
|
|
(6.10) |
где
![]() - полоса когерентности (или интервал
корреляции), определяется на уровне 1/е,
- полоса когерентности (или интервал
корреляции), определяется на уровне 1/е, ![]() -
средняя мощность сигнала.
-
средняя мощность сигнала.
Функция расширения задержек, соответствующей (4.10)
|
|
(6.11) |
Частотно-корреляционная
функция (4.10) для разных городов и различных высот подвеса антенн имеет различный
вид [2] и отличается полосой когерентностью ![]() .
Гауссовский характер функции выбран из расчета, что она соответствует наихудшим
условиям распространения, при этом подвесы как передающей так и приемных антенн
находятся значительно ниже уровня зданий, что соответствует полному затенению
объектов.
.
Гауссовский характер функции выбран из расчета, что она соответствует наихудшим
условиям распространения, при этом подвесы как передающей так и приемных антенн
находятся значительно ниже уровня зданий, что соответствует полному затенению
объектов.
Дальнейшие
расчеты будем проводить для  , что соответствует
попаданию 99,5% всей рассеянной мощности в интервал задержек
, что соответствует
попаданию 99,5% всей рассеянной мощности в интервал задержек ![]() .
.
Таким
образом при анализе влияния межсимвольной интерференции (МСИ) обычно
учитываются только импульсы примыкающим к интервалу ![]() ,
поскольку частотно-селективные замирания предполагаются слабовыраженными.
,
поскольку частотно-селективные замирания предполагаются слабовыраженными.
Вероятность
![]() того, что зарегистрирована 1 при передаче
0 при наличии МСИ
того, что зарегистрирована 1 при передаче
0 при наличии МСИ
 , где
, где 
Здесь
![]() - сегмент
- сегмент ![]() ,
соответствующий передаче последо-вательности символов
,
соответствующий передаче последо-вательности символов ![]() ,
в предположении, что в отсутствии селективных замираний на интервале
,
в предположении, что в отсутствии селективных замираний на интервале ![]() фактически принимается последовательность
фактически принимается последовательность ![]() . Величина b, т.е
. Величина b, т.е ![]() и
и ![]() .
.
Вероятность того, что вследствие МСИ будет зарегистрирован символ 0 при условии, что при передаче отсутствовали переходы сигналов, определяется как
 , где
, где ![]()
Здесь
![]() интерпретируется аналогично
интерпретируется аналогично ![]() .
.
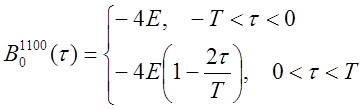
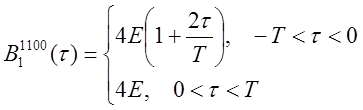
Расчет помехоустойчивости начнем с определения сигналов ДОФМ
Для
определения эквивалентного отношения сигнал/шум ![]() (6.6) необходимо определить моменты
(6.6) необходимо определить моменты
![]() . Для определения моментов воспользуемся
выражением (4.7)
. Для определения моментов воспользуемся
выражением (4.7)
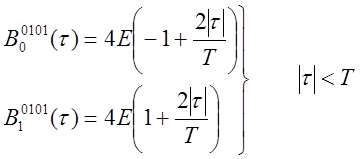
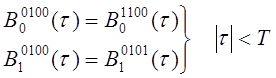
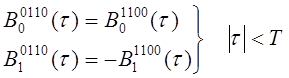
Функции корреляции определяется как

Приведем некоторые функции опуская остальные
Подставляя рассчитанные значения моментов в формулу (6.6), получаем
|
|
(6.14) |
|
|
( 6.15) |
|
|
(6.16) |
|
|
(6.17) |
|
|
(6.18) |
|
|
(6.19) |
Учитывая все выше изложенное, определим вероятность ошибки как
|
|
(6.20) |
где
|
|
(6.21) |
|
|
(6.22) |
Выражения (6.21) и (6.22) сокращены с учетом
Оператор ![]() представляет
собой выражение (6.4) или (6.5)
представляет
собой выражение (6.4) или (6.5)

Для
определения вероятности неустранимой ошибки, в выражении (6.15, 6.16, 6.17, 6.19)
необходимо поставить ![]() и найти предел.
и найти предел.
Таким образом
|
|
(6.23) |
|
|
(6.24) |
|
|
(6.25) |
|
|
(4.26) |
Вероятность ошибочного приема 0 и 1
|
|
(6.27) |
|
|
(6.28) |
Средняя вероятность неустранимой ошибки определяется как
|
|
(6.29) |
На
рисунке 6.2 показана зависимость  для различных М.
для различных М.
Рисунок 6.2 – Зависимость вероятности ошибки от полосы когерентности канала
6.2 Помехоустойчивость разнесенного приема с использованием
пространственно – временного кодирования
Как
было показана в 5-ой главе данной работы метод Аламоути позволяет за счет
использования двух передающих и M – приемных
антенн получить порядок разнесения 2M. Разнесение на передаче требует
излучение в половину мощности, чтобы общая мощность излучения не была
увеличена. По сравнению с разнесением на приеме, уменьшение отношения
сигнал/шум составляет 3дБ. С другой стороны уменьшение излучающей мощности на
передаче благоприятно сказывается на требованиях к линейности усилителей и его
стоимости. Недостатком метода Аламоути является использование количества
передающих антенн кратных ![]() , где n – целые
числа. То есть количество эффективно используемых антенн равно соответственно
2, 4, 8, 16 и т.д. Существуют коды и для 3-х антенн, но они малоэффективны.
, где n – целые
числа. То есть количество эффективно используемых антенн равно соответственно
2, 4, 8, 16 и т.д. Существуют коды и для 3-х антенн, но они малоэффективны.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.