Линеаризацию с помощью секущей ADприменяют редко, так как она хотя и охватывает весь диапазон изменения угловой скорости от нуля до холостого хода, но дает слишком заниженные значения параметров передаточной функции.
Чаще используют линеаризацию с помощью касательной АВ, соответствующей работе двигателя в следящей системе, где часты реверс и пуск. Однако для определения параметров необходимо располагать механической характеристикой, заданной графически.
Рекомендуют осуществлять линеаризацию секущей АС, которая дает промежуточные значения параметров, близкие к номинальному режиму работы. В данном случае параметры передаточной функции определяют без учета заданной графически механической характеристики, только по паспортным данным двигателя и выражению
![]()
где![]() — пусковой момент,
номинальный момент и номинальная частота вращения при номинальном напряжении
управления. Подставив (9.31) и (9.30) в (9.29), получим уравнение электромеханического переходного процесса
в изображениях
— пусковой момент,
номинальный момент и номинальная частота вращения при номинальном напряжении
управления. Подставив (9.31) и (9.30) в (9.29), получим уравнение электромеханического переходного процесса
в изображениях
![]()
Обозначив![]() определим передаточную функцию двигателя:
определим передаточную функцию двигателя:
![]() (9.33)
(9.33)
которая, будучи выведенной без учета
электрических переходных процессов, относится к любому из способов управления
двухфазным двигателем, если можно считать в
динамике справедливыми соотношения, полученные
для установившихся режимов в виде механической и регулировочной
характеристик. Отличие состоит лишь в определении коэффициента kДВ который, например,
для фазового управления![]() где
где![]() — коэффициент управления по фазе.
— коэффициент управления по фазе.
Основные технические данные некоторых серий маломощных асинхронных двигателей приведены в табл. П.12 — П.17.
§ 9.9. Асинхронные тахогенераторы
Наряду с тахогенераторами постоянного тока (см. § 2.3) в автоматических устройствах для преобразования частоты вращения в электрический сигнал применяют тахогенераторы переменного тока.
Из тахогенераторов переменного тока самое широкое применение получили асинхронные тахогенераторы с полым ротором, конструкция которых не отличается от конструкции исполнительного двигателя с полым немагнитным ротором (см. рис. 9.11).
|
|
|
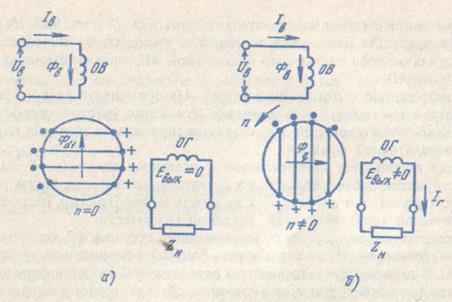
Рис. 9.27. К пояснению принципа действия асинхронного тахогенератора |
К тахогенераторам предъявляют ряд требований, основными из которых являются: линейность выходной характеристики, отсутствие радиопомех, бесшумность работы, простота устройства, эксплуатационная надежность, быстродействие (малая электромеханическая постоянная времени), малые размеры и масса.
Принципиальная схема асинхронного тахогенератора приведена на рис. 9.27. Обмотка ОВ подключена к сети. С обмотки генератора ОГ снимается выходное напряжение тахогенератора. Эта обмотка называется выходной или генераторной и замкнута на нагрузку ZН.
Принцип действия асинхронного тахогенератора состоит в следующем. Переменный ток возбуждения создает пульсирующий поток Фв, который, пересекая полый ротор, наводит в нем ЭДС трансформации, создающую токи в роторе. Контуры этих токов (направления которых обозначены точками и крестиками) располагаются в плоскостях, перпендикулярных потоку возбуждения Фв (рис. 9.27, а). Эти токи создают магнитный поток ротора Фd1, направленный навстречу потоку возбуждения. Разность Фв-Фd1 образует результирующий продольный поток, который при неподвижном роторе не наводит ЭДС в обмотке ОГ, поэтому выходное напряжение тахогенератора равно нулю.
При вращении стенки полого ротора пересекают результирующий поток Ф и в них кроме ЭДС трансформации находится еще ЭДС вращения. Под действием ЭДС вращения по ротору протекают токи, контуры которых при его большом активном сопротивлении практически совпадают с осью потока возбуждения Фв (рис. 9.27,б). Эти токи создают магнитный поток ротора Фq, который направлен по поперечной оси тахогенератора. Магнитный поток Фqсцепляется с витками обмотки ОГ и наводит в них выходную ЭДС тахогенератора Евых. Так как поток Фq изменяется с частотой сети, то и частота выходной ЭДС равна частоте сети и не зависит от частоты вращения ротора.
ЭДС ротора, а следовательно, магнитный поток Фq и выходная ЭДС Евых согласно (1.2) пропорциональны частоте вращения ротора:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.