где ![]() — относительная
частота вращения ротора.
— относительная
частота вращения ротора.
Производную пускового момента в относительных единицах по коэффициенту сигнала называют коэффициентом пускового момента:
![]()
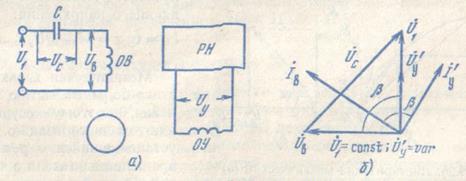
При фазовом управлении (рис. 9.24, а) обмотку возбуждения ОВ подключают к сети с номинальным напряжением. На обмотку управления ОУ от источника питания ИП напряжение, номинальное по значению и переменное по фазе относительно напряжения возбуждения. Управление частотой вращения ротора осуществляют путем изменения фазы напряжения управления — угла β (рис. 9.24, б). При sin β = 1 вращающееся поле имеет форму круга независимо от частоты вращения ротора, а при sin β = 0 получаем пульсирующее поле.
Выражение для вращающего момента (9.16) принимает вид
 (9.26)
(9.26)
а уравнение (9.18) в относительных единицах
 (9.27)
(9.27)
Пусковоймомент в относительных единицах согласно (9.27)
![]() (9.28)
(9.28)
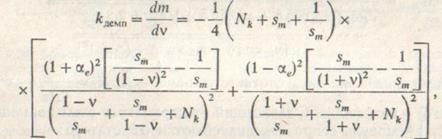
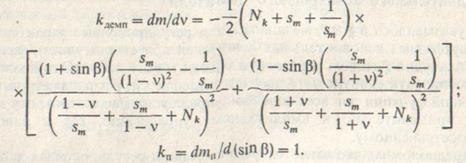
Коэффициенты внутреннего демпфирования и пусковогомомента определяютиз (9.27) и (9.28)
При амплитудно-фазовом управлении (рис. 9.25, а) обмотку управления ОУ подключают к сети через регулятор
напряжения РН, напряжение![]() совпадает
по фазе с напряжением сети
совпадает
по фазе с напряжением сети![]() . Сдвиг по фазе тока, а следовательно, и напряжения на обмотке
возбуждения ОВ относительно напряжения обмотки ОУ осуществляют с
помощью конденсатора С, который включают последовательно с обмоткой ОВ. Управление
двигателем производят путем изменения
напряжения управления. Несмотря на то
что фаза приведенного напряжения управления
. Сдвиг по фазе тока, а следовательно, и напряжения на обмотке
возбуждения ОВ относительно напряжения обмотки ОУ осуществляют с
помощью конденсатора С, который включают последовательно с обмоткой ОВ. Управление
двигателем производят путем изменения
напряжения управления. Несмотря на то
что фаза приведенного напряжения управления![]() постоянна (совпадает с фазой
постоянна (совпадает с фазой ![]() ) (рис. 9.25,б), при регулировании
) (рис. 9.25,б), при регулировании![]() наблюдается
одновременное изменение как значения,
так и фазы
наблюдается
одновременное изменение как значения,
так и фазы![]() . Это объясняется тем, что
напряжение возбуждения
. Это объясняется тем, что
напряжение возбуждения ![]() равно геометрической разности напряжения сети
равно геометрической разности напряжения сети![]() и напряжения на
конденсаторе
и напряжения на
конденсаторе ![]() (рис.
9.25.б);
(рис.
9.25.б);
![]()
Напряжение на
конденсаторе![]() при изменении
при изменении![]() или частоты вращения ротора n меняется вследствие
изменения тока вцепи возбуждения, который является функцией скольжения и
коэффициента сигнала:
или частоты вращения ротора n меняется вследствие
изменения тока вцепи возбуждения, который является функцией скольжения и
коэффициента сигнала: ![]() Следовательно,
меняются значение и фаза напряжения возбуждения
Следовательно,
меняются значение и фаза напряжения возбуждения![]()
|
|
|
Рис 9.25. Схема амплитудно-фазового управления исполнительным двигателем с конденсатором в цепи возбуждения |
Отметим, что механические характеристики исполнительных двигателей при различных способах управления (амплитудном, фазовом, амплитудно-фазовом) близки между собой. Незначительно отличаются между собой по виду и регулировочные характеристики (ср. кривые 1, 2 и 3 на рис. 9.16 и 9.17).
§ 9.8. Передаточная функция двухфазного исполнительного асинхронного двигателя
Как указывалось в § 9.7, механические и регулировочные характеристики двухфазных исполнительных двигателей при амплитудном, фазовом и амплитудно-фазовом управлении близки между собой. Это позволяет рекомендовать единую методику определения вида и параметров передаточной функции для всех способов управления. Рассмотрим эту методику применительно к амплитудному управлению, как к наиболее распространенному.
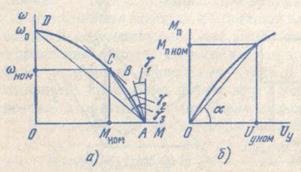
Предположим, что имеются механическая и регулировочная характеристики двигателя при таком способе управления (рис. 9.26). Для учета влияния параметров усилителя на свойства привода целесообразно использовать характеристики, полученные экспериментальным или расчетным путем для двигателя с выходным каскадом усилителя, питающего обмотку управления.
Полагая Mc = 0 (при его учете необходимо использовать уравнения в отклонениях), запишем исходные уравнения в виде:
![]() (9.29)
(9.29)
![]() (9.30)
(9.30)
![]() (9.31)
(9.31)
где![]() (рис. 9.26, а).
(рис. 9.26, а).
Зависимость (9.31) считают линейной (рис. 9.26,б), поэтому коэффициент управления по напряжению kUлегко определить из (9.31), подставив номинальные значения пускового момента и управляющего напряжения:
![]() (9.32)
(9.32)
|
|
|
Рис. 9.26. Линеаризация механической (а) и регулировочной (б) характеристик двухфазного исполнительного двигателя |
Механическая характеристика большей частью нелинейна, поэтому осуществляют ее линеаризацию. Если установившийся режим — вращение двигателя с частотой, близкой к номинальной, то правильнее провести линеаризацию с помощью касательной в точке С (рис. 9.26, а). Если частота вращения изменяется в широких пределах, то линеаризацию осуществляют либо с помощью касательной АВ, либо с помощью секущих АС и AD.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.