По конструкции такой двигатель малой мощности имеет сходство с гироскопическим — имеет наружный ротор с короткозамкнутой обмоткой по внутренней поверхности его расточки и внутренний статор с наружными пазами и уложенными в них обмотками (рис. 9.35), т. е. является многополюсным реверсивным асинхронным двигателем. Вследствие многополюсности он имеет плоскую конструкцию, т. е. относительно большой диаметр и малую осевую длину. Внутренний статор двигателя с обмотками закрепляют на рамке гироскопа, а его наружный ротор — па крышке гироскопа. Пазы ротора, расположенные по внутренней поверхности его расточки, имеют скос на одно пазовое деление
|
|
|
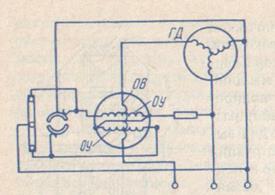
Рис. 9.36. Схема включения однофазного моментного двигателя с тремя обмотками на статоре |
На рис. 9.36 представлена схема включения в гироскопическом устройстве однофазного моментного двигателя с тремя обмотками на внутреннем статоре - одной обмоткой ОВ и двумя обмотками ОУ. Последние сдвинуты по окружности статора относительно обмотки ОВ на половину полюсного деления и уложены в одни и те же пазы бифиллярно. Обмотка ОВ включена последовательно, а обмотка управления ОУ — параллельно в трехфазную цепь гироскопического двигателя ГД,Реверсирование корректирующего момента двигателя достигается изменением направления тока в двух противоположно включаемых обмотках ОУ.
Если по одной из управляющих обмоток протекает переменный ток, сдвинутый по фазе относительно тока обмотки возбуждения на какой-то угол. то двигатель начнет создавать вращающий момент. При протекании тока по другой управляющей обмотке вращающий момент изменит свой знак. При включении управляющих обмоток параллельно в сеть по ним протекают одинаковые токи в противоположных направлениях, вращающий момент двигателя равен нулю. При неравенстве токов в этих обмотках в двигателе возникает вращающий момент определенного направления.
При проектировании трех- и однофазных моментных двигателей малой мощности стремятся получить заданные вращающие моменты при минимальной потребляемой мощности. Эта мощность практически равна мощности потерь в меди обмоток статора и ротора и позволяет определить тепловой режим двигателя в заторможенном состоянии. Потери в стали двигателя относительно малы вследствие небольших индукций в отдельных участках магнитной системы.
§ 9.11. Линейные асинхронные двигатели
Линейными двигателями называют такие электрические машины, в которых электрическая энергия преобразуется в механическую энергию поступательного движения без механических передач. Такие машины малой мощности применяют в приводах конвейеров, линейных транспортерах. промышленных роботах, насосах и других машинах, в которых требуется поступательное или возвратно-поступательное движение.
|
|
|
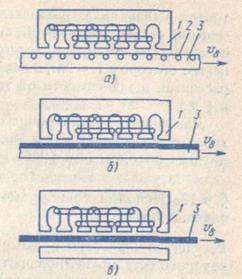
Рис. 9.37. Схема конструкции линейного асинхронного двигателя |
Статор такого двигателя представляет собой линейный магнитопровод l(рис. 9.37), на котором уложена трехфазная или двухфазная обмотка, создающая бегущее магнитное поле. Подвижную часть двигателя, совершающего поступательное движение под действием бегущего магнитного поля, называют бегуном. В зависимости от устройства бегуна различают следующие виды линейных двигателей: асинхронные, синхронные, шаговые и т. п. Наибольшее распространение получили асинхронные линейные двигатели в силу ограниченности линейного перемещения и простоты устройства бегуна. В зависимости от типа бегуна их разделяют на три группы: 1) двигатели с бегуном 3, имеющим короткозамкнутую обмотку 2 (рис. 9.37, а); 2) двигатели со сплошным ферромагнитным омедненным бегуном 3 (рис. 9,37.б); 3) двигатели с магнитным бегуном 3 (рис. 9.37. в).
Отличительная особенность линейного двигателя с магнитным бегуном состоит в том, что в нем практически отсутствуют силы притяжения бегуна к статору, что важно для некоторых типов приводов.
Для анализа основных соотношений и оценки характеристик линейный двигатель можно
рассматривать как обычный асинхронный двигатель с развернутым статором. Длина
развертки статора равна длине его окружности ![]() (см. § 1.3).
(см. § 1.3).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.