Работа ШД с короткими сериями импульсов и произвольной паузой между ними также может быть приравнена к реверсу, так как начальная частота вращения при отработке очередной серии импульсов, возникающая в процессе колебаний ротора после отработки предыдущей серии, может быть отрицательной. Устойчивая работа ШД в этом случае достигается за счет увеличения нагрузки для ускорения затухания переходного процесса.
Специфика конструкции ШД и многообразие режимов их работы вызывают необходимость оценивать эти двигатели по следующим характеристикам: статическим, предельным динамическим, предельным механическим.
Статические характеристики двигателя (рассмотренные в предыдущих параграфах) позволяют определить угловую погрешность при работе в квазистатическом режиме на холостом ходу или под нагрузкой.
Предельные динамические характеристики двигателя представляют собой зависимости частоты приемистости от момента сопротивления и момента инерции нагрузки. Такие характеристики называют предельными динамическими характеристиками пуска. Существуют также предельные динамические характеристики торможения или реверса, под которыми понимают аналогичные зависимости предельной частоты управляющих импульсов в соответствующем режиме от момента сопротивления и момента инерции нагрузки.
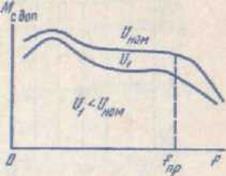
Предельные механические характеристики двигателя представляют собой зависимость допустимого момента сопротивления от частоты управляющих импульсов в установившемся режиме работы (рис. 13.18). Снижение Мсдоп при увеличении f объясняется в основном наличием электромагнитной постоянной времени Ту обмоток управления:
![]()
где Ry, Ly — активное сопротивление и индуктивность обмотки управления; Rд- добавочное сопротивление реостата, включаемого последовательно с обмоткой управления для уменьшения Ту. Последнее объясняется тем, что чем больше Ту, тем меньше за время импульса напряжения, поступающего со схемы управления двигателем, нарастает ток. Это снижает синхронизирующий момент, а следовательно, и допустимый момент сопротивления. Снижение напряжения, питающего об мотки управления, также уменьшает Мсдоп.
|
|
|
Рис. 13.18. Предельные механические характеристики ШД |
Устойчивость работы двигателя зависит также от соотношения между частотой управляющих импульсов f и частотой свободных колебаний ротора
![]()
где Мmax-максимальный статический синхронизирующий момент; Jдв J'c-моменты инерции соответственно ротора двигателя и нагрузки, при веденной к валу двигателя. При f < f0 каждый шаг ротора сопровождается свободными колебаниями
|
|
|
|
При частоте f, равной или в целое число раз меньшей частоты f0, возникает электромеханический резонанс, который при слабом демпфировании колебаний может привести к нарушению периодичности движения ротора и выпадению его им синхронизма.
При f > f0
вращение ротора сопровождается вынужденными колебаниями с частотой f, амплитуда которых монотонно уменьшается
с увеличением f. Для устойчивой работы ШД необходимо,
чтобы (Mc/Mmax)≤ 0,3 + 0,5; (![]() /Jдв) ≤ 1 + + 2.
/Jдв) ≤ 1 + + 2.
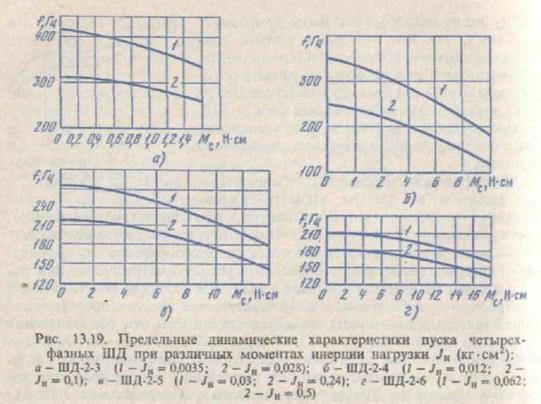
В табл. П.27 приведены основные технические данные реверсивных магнитоэлектрических ШД. Двигатели серии ШД-2-1 - ШД-2-6 являются четырехфазными с обмотками, выполненными по схеме рис. 13.15, а. Параметры, приведенные в таблице, соответствуют четырехтактной коммутации с однополярными импульсами токов управления при парной коммутации, как показано на рис. 13.15,е. На рис. 13.19 приведены предельные динамические характеристики пуска таких двигателей.
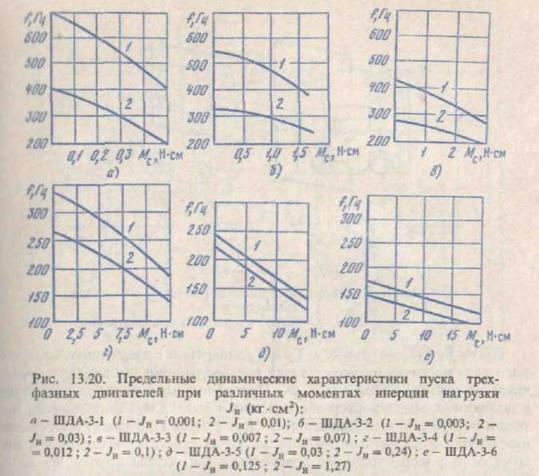
Двигатели ШДА-3-1 - ШДА-3-6 являются трехфазными с обмотками, выполненными по схеме рис. 13.16, а. Параметры в таблице соответствуют шеститактной коммутации с разнополярными импульсами линейных напряжений управления при парной коммутации, показанной на рис. 13.16, б, в. На рис. 13.20 приведены предельные динамические характеристики пуска этих двигателей.
В табл. П.28 приведены технические данные двух параметрических реверсивных ШД. Двигатель ШДР-50/1800 является реактивным; двигатель ШДИ-1 является индукторным, имеющим электромагнитное возбуждение. В таблице приведены данные для четырехтактной коммутации, выполняемой, как показано на рис. 13.15, д.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.