Класс
точности ВТ определяется относительной погрешностью ∆u, выраженной в процентах, т. е. разностью ординат в любой точке
действительной кривой![]() и идеальной синусоидальной кривой
и идеальной синусоидальной кривой![]() ототнесенной
к амплитуде Umax.
ототнесенной
к амплитуде Umax.
ВТ подразделяют на четыре
класса точности: нулевой![]() первый
первый ![]() второй
второй ![]() третий
третий![]()
В зависимости от режима работы ВТ бывают следующих типов; синусно-косинусные, линейные и ВТ-построители.
§ 10.2. Синусно-косинусный вращающийся трансформатор
|
|
|
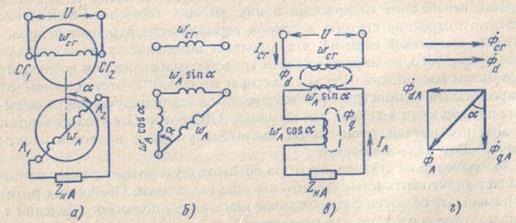
Рис. 10.2. Принципиальная (а), преобразованные (б, в) схемы и векторная диаграмма потоков (г) синусного вращающегося трансформатора |
Рассмотрим работу
синусного ВТ. В этом режиме главная статорная обмотка СГ1 — СГ2 подключена к
источнику переменного тока; напряжение V= const. Синусная обмотка ротора A1—А2 питает внешнюю нагрузку (рис. 10.2, а). Вспомогательная статорная (CB1— СВ2)
и косинусная роторная (Б1 — Б2) обмотки разомкнуты.
Эти обмотки в схеме можно не показывать, как не принимающие участия в работе.
Допустим, что тип обмоток,
конструкция и технологическое выполнение ВТ обеспечили
строгую синусоидальную зависимость взаимной индуктивности между обмотками СГ1 — СГ2
и А1—А2 от угла поворота ротора α. Тогда где
(Mст А)max соответствует![]() Так как взаимная индуктивность пропорциональна произведению
чисел витков электромагнитно связанных обмоток, то можно записать
Так как взаимная индуктивность пропорциональна произведению
чисел витков электромагнитно связанных обмоток, то можно записать
![]()
где λ— коэффициент пропорциональности; wсг , wА — эффективные числа витков обмоток СГ1 — СГ2 и А1 — А2, равные произведению действительных чисел витков обмотки на ее обмоточный коэффициент. Взаимная индуктивность между обмотками СГ1 — СГ2и А1 — А2 при угле поворота ротора α может быть определена следующим образом.
Полное число витков обмотки А1 — А2можно рассматривать как геометрическую сумму чисел «продольных» (wАsin α) и «поперечных» (wАcosα) витков. Ось последних перпендикулярна оси обмотки СГ1 — — СГ2. Преобразованные схемы ВТ приведены на рис. 10.2,б, в.
При холостом ходе ВТ (ZhА = ∞) ток в обмотке А1 — А2не протекает и ЭДС ротора EpA зависит от потока взаимной индукции между обмоткой СГ1 — СГ2 и «продольными» витками wАsinα, т. е. продольным потоком Фd. Тогда
![]()
где![]() — максимальное значение ЭДС, соответствующее α =90/. Следовательно,
— максимальное значение ЭДС, соответствующее α =90/. Следовательно,
![]() (10.1)
(10.1)
т. е. получают
синусный ВТ, у которого при холостом ходе ЭДС ротора является
синусоидальной функцией угла поворота ротора α При подключении роторной
обмотки к нагрузке (рис. 10.2, в) по ней протекает ток![]() создавая магнитный поток ротора
создавая магнитный поток ротора![]() , который можно разложить на продольную
, который можно разложить на продольную ![]() и поперечную
и поперечную ![]() составляющие (рис. 10.2, г). Поток
составляющие (рис. 10.2, г). Поток![]() направлен против потока статора
направлен против потока статора ![]() и размагничивает ВТ. Размагничивающее действие
и размагничивает ВТ. Размагничивающее действие ![]() уравновешивается
увеличением тока
уравновешивается
увеличением тока![]() в
статорной обмотке. Следовательно, по продольной оси ВТ действует результирующий поток
в
статорной обмотке. Следовательно, по продольной оси ВТ действует результирующий поток![]() который в «продольных» виткахwАsinα по-прежнему наводит
ЭДС взаимной индукции
который в «продольных» виткахwАsinα по-прежнему наводит
ЭДС взаимной индукции![]()
Поперечная составляющая потока ФqA, пронизывая
«поперечные» витки wqAcosα, наводит в них ЭДС
самоиндукции![]()
где
![]()
Полная ЭДС, наводимая в обмотке А1 —
А2, представляет собой сумму ЭДС![]() и
и![]()
![]()
Ток
![]()
где![]() — сопротивление обмотки А1 —
А2Тогда
— сопротивление обмотки А1 —
А2Тогда
 (10.2)
(10.2)
Из уравнения (10.2) находим
![]() (10.3)
(10.3)
где![]() — постоянный
комплексный множитель.
— постоянный
комплексный множитель.
Из уравнения (10.3) следует, что при нагрузке синусного ВТ из-за наличия в знаменателе
члена![]() искажается
синусоидальный характер зависимости
искажается
синусоидальный характер зависимости![]() от угла α. Это обусловлено появлением
поперечного потока ФqA.
от угла α. Это обусловлено появлением
поперечного потока ФqA.
Если разомкнуть синусную (А1 — А2) и нагрузить косинусную (Б1 —Б2) роторные обмотки, то взаимная индуктивность между главной статорной (СГ1 — СГ2) и косинусной (Б1 — Б2) обмотками
![]()
При холостом ходе ЭДС
![]() (10.4)
(10.4)
При нагрузке обмотки Б, - Б2, рассуждая аналогично изложенному ранее, получим
![]() (10.5)
(10.5)
Здесь искажение косинусоидальной зависимости обусловлено наличием в знаменателе
члена![]()
Так как выходные напряжения ВТ должны изменяться по закону синуса или косинуса угла α, на практике необходимо устранять погрешности, возникающие от поперечного потока ротора, компенсируя его. Для этого нагружают вспомогательную статорную (первичное симметрирование) или косинусную роторную (вторичное симметрирование) обмотки.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.