Реверсивные двигатели делают не только с реактивным, но и с активным ротором. В них используют свойство постоянного магнита (ротора) притягиваться к полюсу статора, имеющему противоположную полярность.
|
|
|
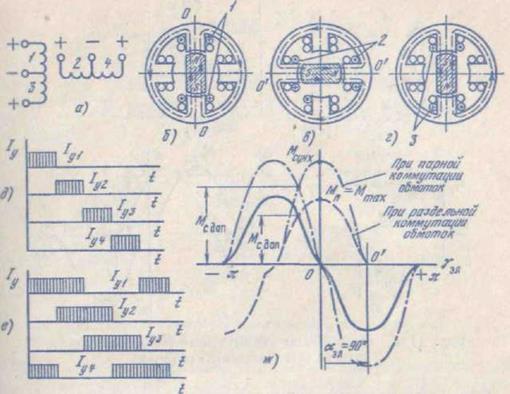
Рис. 13.15. К пояснению работы четырехфазного реверсивного ШД с активным ротором |
Если в обмотки управления подавать, чередуя, токи положительной и отрицательной полярности, можно создать работоспособный двухфазный реверсивный ШД с активным ротором. Однако такая схема питания обмоток усложняет схему управления, поэтому в большинстве случаев об мотки двухфазных двигателей выполняют с выводами от средних точек (рис. 13.15,а). Таким образом, каждая фаза оказывается расщепленной на две полуфазы, и обмотка двигателя, по существу, становится четырехфазной. Посылая в такую обмотку однополярные импульсы, сдвинутые во времени, заставляют ротор «следить» за полюсом статора, перемещающимся согласно (13.3) с шагом α = 360°/(pm) = 360°/(1∙4) = = 90°. На рис. 13.15,б-г показаны три последовательных момента протекания тока управления в фазах 1 — 3, перемещения МДС полюсов и положения ротора, соответствующие импульсам тока, показанным на рис. 13.15,д. Шаг в электрических градусах для активного ротора αэл= = pα. Поэтому каждому переключению этих импульсов соответствует сдвиг на αэл= 1∙90° = 90° кривой синхронизирующего момента, в результате чего для такого двигателя сохраняются характеристики Мп,
Мсдоп (рис. 13.15,ж), приведенные на рис. 13,14, е для четырехфазного двигателя с реактивным ротором.
Реверс четырехфазного ШД осуществляют подачей токов в фазы в обратной последовательности, т. е. 4 — 3 — 2 — 1.
Для лучшего использования обмоток при четырехтактной коммутации применяют попарное включение обмоток (рис. 13.15,е). Импульсы перекрывают друг друга на полтакта, поэтому в каждый момент времени ток течет в паре обмоток и возбужденными оказываются пары соседних полюсов (1 и 2 или 2 и 3, 3 и 4 или 4 и 1).
Такая парная коммутация позволяет увеличить МДС полюсов ста тора, вследствие чего примерно в полтора раза возрастает вращающий момент на валу двигателя (рис. 13.15,ж).
|
|
|
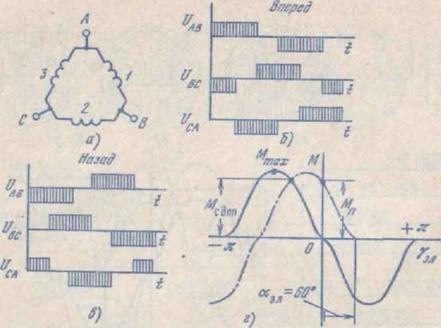
Рис. 13.16. Шеститактная коммутация трехфазного реверсивного ШД с активным ротором |
С активным ротором выполняют и трехфазные реверсивные ШД. Если трехфазную обмотку (рис. 13.16,а) питать токами положительной и отрицательной полярности (рис. 13.16,б,в), то можно осуществить шеститактную коммутацию. В этом случае допустимый момент сопротивления оказывается равным пусковому, как это очевидно из рис. 13.16,г, где штрихпунктирной линией нанесена кривая синхронизирующего момента для шеститактной коммутации.
Трехфазные ШД с активным ротором при шеститактной коммутации имеют более широкую зону устойчивости и лучшее использование материала постоянного магнита, чем двухфазные ШД с четырехтактной коммутацией. Они обладают высокими динамическими характеристиками, устойчивостью, равномерностью движения и экономичностью
Трех- и четырехфазные двигатели с активным ротором за счет потока постоянного магнита в обесточенном состоянии развивают статический синхронизирующий момент в пределах 5 - 10% от его максимального значения, который фиксирует ротор в положении последнего отработанного им импульса.
Магнитоэлектрические ШД удастся выполнить с шагом до 15°. Дальнейшее уменьшение шага ограничено технологическими трудностями создания ротора в виде постоянного магнита с числом пар полюсов, большим шести. Поэтому двигатели с шагом от единиц до долей градуса выполняются как редукторные, т. е. с зубчатыми полюсами и ротором из магнитомягкого ферромагнетика. Такие двигатели называют также параметрическими
|
|
|
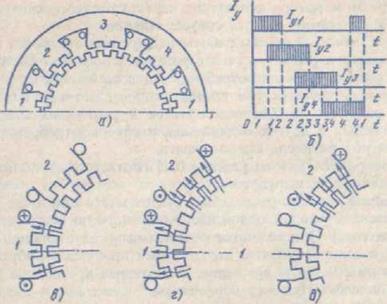
Рис. 13.17. Четырехфазный параметрический редукторный ЩД с реактивным ротором |
Шаг двигателя с реактивным ротором может быть уменьшен вдвое, если применить подачу импульсов с перекрытием (рис. 13.17,б). Такая коммутация, обозначаемая как 1; 1 и 2; 2; 2 и 3; 3; 3 и 4; 4; 4 и /, «является восьмитактной и ей соответствует шаг α= 1,5°. На рис. 13.17, в-д показаны положения ротора для первых трех тактов.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.