Асинхронный исполнительный двигатель с короткозамкнутым ротором выполняют с малым воздушным зазором — до 0,15 мм. Уменьшение воздушного зазора снижает намагничивающий ток, что увеличивает коэффициент мощности, КПД, вращающий момент и, следовательно, повышает быстродействие.
Асинхронные двигатели с полым ферромагнитным ротором. Такие двигатели используют в схемах автоматики в качестве исполнительных и вспомогательных. Ротор выполняют в виде стального цилиндра с толщиной стенки 0,5 — 3 мм. Внутреннего статора нет, так как магнитный поток замыкается через ротор. Вследствие эффекта вытеснения тока и большого удельного сопротивления стали активное сопротивление полого ферромагнитного ротора довольно высокое, что устраняет самоход, обеспечивает устойчивую работу двигателя во всем диапазоне частот вращения и приближает механические и регулировочные характеристики к линейным. Этот двигатель обладает большим моментом инерции и небольшим пусковым моментом, что снижает его быстродействие. Для увеличения пускового момента и мощности в некоторых двигателях цилиндрическую поверхность ротора покрывают слоем меди толщиной 0,05 — 0,1 мм, а торцовые поверхности — слоем меди до 1 мм. Следует иметь в виду, что стальной ротор таких двигателей чувствителен к неравномерности воздушного зазора и при небольшом эксцентриситете может произойти «прилипание» ротора.
Асинхронные двигатели с массивным ферромагнитным ротором. Эти двигатели удобны в маломощных установках, работающих на высоких скоростях. Ротор двигателя не имеет обмотки, он выполнен в виде массивного цилиндра из стали или чугуна и обладает большим моментом инерции. Для улучшения характеристик поверхности ротора омедняют.
Принцип действия таких двигателей состоит вследующем. При подведении к обмотке управления ОУ напряжения Uy(см. рис. 9.8, а) токи, протекающие по обмоткам, создают круговое или эллиптическое вращающееся магнитное поле. Это поле, пересекая полый ротор или проводники короткозамкнутого ротора, индуктирует в нем токи. В результате взаимодействия этих токов с вращающимся магнитным полем создается вращающийся момент, который, действуя на ротор, увлекает его в сторону вращения поля.
§ 9.4. Схемы замещения и параметры двухфазных исполнительных асинхронных двигателей
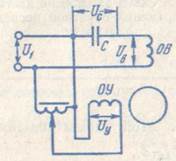
Предположим, что к обмоткам возбуждения ОВ и управления ОУ (рис. 9.12) подведены напряжения, сдвинутые на угол φ.
В общем
случае![]() поэтому параметры обмотки ОУ приведем
к параметрам
обмотки ОВ, где
поэтому параметры обмотки ОУ приведем
к параметрам
обмотки ОВ, где![]() — эффективные числа витков, определяемые
через действительные числа витков и обмоточные коэффициенты. Тогда
— эффективные числа витков, определяемые
через действительные числа витков и обмоточные коэффициенты. Тогда ![]() ,
, ![]() ггде
ггде ![]() Кроме того,
Кроме того, ![]()
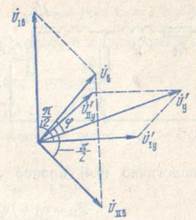
Воспользуемся методом симметричных составляющих, согласно которому любая несимметричная
двухфазная система временных векторов, например напряжений (рис. 9.13), может быть
разложена на две симметричные составляющие, каждая из которых состоит из двух векторов, одинаковых по
значению и сдвинутых между собой на угол 90°. Одна из них — система векторов
напряжений прямой последовательности![]() и
и![]() - имеет чередование фаз такое же, как у
исходной несимметричной
системы, а другая — система векторов напряжений обратной последовательности
- имеет чередование фаз такое же, как у
исходной несимметричной
системы, а другая — система векторов напряжений обратной последовательности![]() и
и![]() — имеет противоположное чередование фаз. Таким образом, согласно рис. 9.13 можно записать следующие уравнения:
— имеет противоположное чередование фаз. Таким образом, согласно рис. 9.13 можно записать следующие уравнения:
![]()
![]()
![]()
![]()
|
|
|
|
Рис. 9.12. Схема двухфазного исполнительного асинхронного двигателя |
Рис. 9.13 Несимметричная система векторов напряжений и ее симметричные составляющие |
т. е. напряжения равны по значению и сдвинуты на 90°. Следовательно,
![]() (9.3)
(9.3)
Решим эти уравнения совместно, предварительно умножив их на —j:
![]()
Умножив на +jи сложив уравнения (9.3), получим напряжение обратной последовательности
![]()
Схема замещения асинхронного двигателя для напряжений прямой последовательности представлена на рис. 9.14. Параметры двигателя можно заменить полным сопротивлением схемы замещения
![]() (9.4)
(9.4)
где rI xI - активная и
индуктивная составляющие полного сопротивления для прямой последовательности; ![]() - полные сопротивления для соответствующих участков схемы замещения.
- полные сопротивления для соответствующих участков схемы замещения.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.