Самоход такого рода (технологический) чаще всего возникает у двигателей малой мощности (доли ватта), у которых ротор в силу ничтожной инерции приходит во вращение при малейшем отклонении характера поля от пульсирующего.
Для устранения технологического самохода необходимо самым тщательным образом изготовлять обмотку, не допуская коротких замыканий. Рекомендуется применять острые штампы, не требующие последующей обработки пакета; склейку листов вместо стягивания их шпильками; веерообразную сборку.
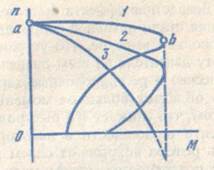
Асинхронный исполнительный двигатель должен работать на устойчивой части механической характеристики в широком диапазоне частот вращения. Этого можно добиться, если выполнить ротор с большим активным сопротивлением, при котором максимум вращающего момента смещается в область отрицательных частот вращения (рис. 9.10, кривая 3). Для сравнения на том же рисунке показаны механические характеристики обычного асинхронного двигателя (кривая 1), имеющего участок ab устойчивой работы, составляющий 10—20% от диапазона изменения частот вращения, и двигателя с повышенным сопротивлением ротора (кривая 2).
Следовательно, путем увеличения активного сопротивления обеспечивается работа двигателя в широком диапазоне изменения частоты вращения ротора на устойчивой части механической характеристики, ее линейность и отсутствие самохода в однофазном режиме.
Высокое быстродействие исполнительных двигателей можно обеспечить, выполнив их с малым моментом инерции вращающихся частей.
Асинхронные двигатели с полым немагнитным ротором.
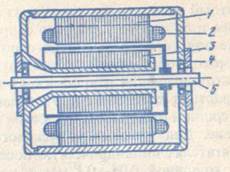
Схема конструкции такого двигателя представлена на рис. 9.11. Внешний статор 1 набран из листов электротехнической стали и не отличается от статора обычного асинхронного двигателя. Обмотки 2 возбуждения и управления, расположенные в пазах статора, как правило, выполняют двухслойными с укороченным шагом. Внутренний статор 3 набирают из листов электротехнической стали, он служит для уменьшения магнитного сопротивления потоку, проходящему через зазор. Полый ротор 4 выполняют в виде тонкостенного стакана из сплавов алюминия. Своим дном он жестко укрепляется на валу 5, свободно вращающемся в подшипниках. Толщину стенок ротора в зависимости от мощности берут в пределах от 0,2 до 1,0 мм
|
|
|
|
Рис. 9.10. Механические характеристики асинхронного двигателя с различным активным сопротивлением ротора |
Рис. 9.11. Схема конструкции исполнительного двигателя с полым немагнитным ротором |
В двигателях мощностью до 1,5 Вт обмотки размещают в пазах внутреннего статора, а внешний статор служит для уменьшения магнитного сопротивления. Иногда одну из обмоток размещают на внешнем, а другую на внутреннем статоре.
Размер зазоров между ротором и статорами не превосходит 0,15-0,25 мм. Так как ротор является немагнитным и представляет собой как бы зазор, общий размер зазора между внешним и внутренним статором составляет 0,5-1,5 мм.
Из-за большого зазора намагничивающий ток двигателя с полым немагнитным ротором достигает 90% от номинального тока. Коэффициент мощности и КПД двигателя низкие. Из-за большого намагничивающего тока приходится увеличивать площадь сечения провода обмоток и объем пазов статора, а следовательно, размеры и общую массу машины.
К преимуществам таких двигателей следует отнести высокое быстродействие, бесшумность вращения, отсутствие радиопомех.
Исполнительные двигатели с полым немагнитным ротором изготовляют мощностью от долей до сотен ватт на частоты 50, 400, 500, 800 и 1000 Гц.
Асинхронные двухфазные двигателя с короткозамкнутым ротором. Эти двигатели применяют в системах автоматики, где быстродействие не играет существенной роли. Обмотку ротора выполняют из материала с повышенным удельным сопротивлением (латунь, бронза), с тем чтобы увеличить зону устойчивой работы, обеспечить линейность регулирования, устранить самоход. При этом критическое скольжение sm = 3 ÷ 4.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.