На рис. 10.11 показан общий вид обмоток поворотного индуктосина. Для получения симметричных обмоток число печатных проводников на роторе и в секции статора должно быть четным. Число проводников и обмотках индуктосина зависит от числа пар полюсов, которые выбирают кратными 10∙2* (к = 1; 2: 3; ...) и 180 в зависимости от способа применения индуктосина. Синусоидальную зависимость коэффициента взаимоиндукции достигают путем выбора определенного отношения ширины проводника к полюсному делению, скоса проводников и сокращения шага обмотки статора относительно обмотки ротора. Частота напряжения питания индуктосина 10-100 кГц; при этом коэффициент передачи напряжения составляет 0,005-0,01. Применение более высоких частот вызывает неравномерное распределение токов в проводниках н увеличивает влияние емкостных связей между обмотками, что снижает точность работы индуктосина. Обмотки индуктосина на указанных частотах имеют практически только активное сопротивление, которое составляет несколько омов.
Таким образом, поворотный индуктоснн по своим электромагнитным связям эквивалентен ВТ с сосредоточенными обмотками, имеющему одну обмотку на роторе и синусную и косинусную обмотки на статоре.
Возможны различные режимы работы индуктосинов. При питании обмоток статора переменным током в роторе индуктосина наводится ЭДС, амплитуда и фаза которой являются функциями угла поворота ротора. В зависимости от способа питания обмоток статора различают два режима работы индуктосина.
При питании обмоток напряжениями, амплитуды которых изменяются по синусоидальному и косинусоидальному законам, а фазы со-впадают, индуктосин работает в режиме пульсирующего поля, а изменение угла производят при нулевом напряжении на выходе индуктосина. Этот режим работы индуктосина называют амплитудным, он аналогичен работе ВТ в режиме построителя и отличается от него наличием электромагнитной редукции (см. § 10.5).
|
|
|
|
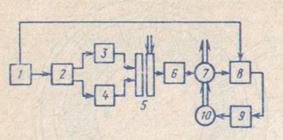
Рис. 10.12. Структурная схема следящей системы с индуктосином в фазовом режиме |
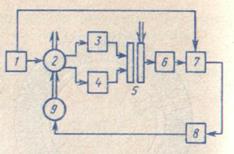
Рис. 10.13. Структурная схема следящей системы с индуктосином в амплитудном режиме. |
При питании обмоток статора напряжениями равной амплитуды, но сдвинутыми по фазе на 90°, индуктосин работает в режиме кругового вращающегося поля, а измерение угла сводится к измерению фазы напряжения на однофазной обмотке индуктосина. При фазовом режиме работы индуктосин представляет собой многополюсный индукционный фазовращатель, отличающийся от обычного ВТ в режиме фазовращателя наличием электромагнитной редукции.
В качестве примера использования указанных режимов рассмотрим индикаторную следящую систему. На рис. 10.12 и 10.13 показаны структурные схемы следящих систем с индуктосинами в фазовом и амплитудном режимах. При фазовом режиме (рис. 10.12) работа системы происходит следующим образом. Напряжение генератора 1 через фазорасщепитель 2 и усилители 3 и 4 подается со сдвигом по фазе на 90о на статорные обмотки индуктосина 5. Напряжение с выхода индуктосина через усилитель 6 и фазовращатель 7 поступает на вход фазочувствительного выпрямителя 8, опорное напряжение которого задается генератором 1. Следящая система, состоящая из силового усилителя 9 и двигателя с редуктором 10, путем поворота ротора фазовращателя 7 сводит к нулю появившийся на выходе фазочувствительного выпрямителя сигнал рассогласования. При повороте индуктосина на угол α ротор фазовращателя повернется на угол pα, где p-число пар полюсов индуктосина. Если снабдить фазовращатель шкальным устройством, то можно произвести отсчет угла поворота ротора индуктосина с высокой точностью.
При амплитудном режиме работы индуктосина (рис. 10.13) работа схемы существенно меняется. Как и раньше, питание схемы производится от генератора 1, напряжение которого подводится на двухполюсный вращающийся трансформатор 2. Напряжения ВТ, пропорциональные синусу и косинусу угла поворота, поступают через усилители 3 и 4 (или без них) на обмотки статора индуктосина. Напряжение с ротора индуктосина через усилитель 6 подается на вход фазочувствительного выпрямителя, опорное напряжение которого задается генератором 1. Выходной сигнал с выпрямителя поступает на силовой усилитель 8 и далее на управляемый двигатель 9, который через механический редуктор поворачивает ротор ВТ до тех пор, пока сигнал рассогласования не станет равным нулю.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.