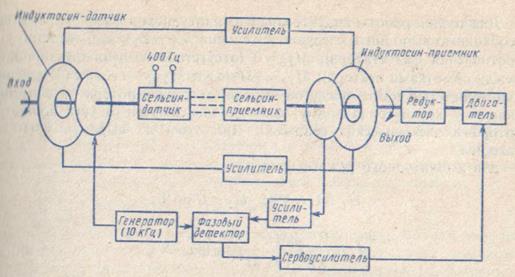
Поворот ротора двухполюсного ВТ, как и при фазовом режиме, равем pα. Оба режима работы можно также использовать при разработке синхронных следящих систем с каналами грубого и точного отсчета (рис. 10.14). В начале грубого отсчета применены двухполюсные ВТ, а в начале точного отсчета поворотные идуктосины с равным числом пар полюсов
|
|
|
Рис. 10.14. Принципиальная схема следящей системы с каналам грубого и точного отсчета |
Индуктосины применяют в прецизионных преобразователях код-угол и угол-код. При этом в первом преобразователе используют амплитудный, а во втором - фазовый режим работы
Индуктосины применяют в прецизионных преобразователях код-угол и угол-код. При этом в первом преобразователе используют амплитудный, а во втором - фазовый режим работы
|
|
|
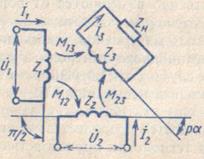
Рис 10.15. Схема электромагнитных связей обмоток индуктосина |
Этой схеме соответствует система уравнений
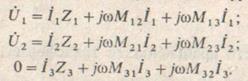 (10.14)
(10.14)
Решаяэту систему относительно тока ротора i3, получим
![]() (10.15)
(10.15)
где ∆ - определитель системы уравнений (10.14).
Для точной работы индуктосина в амплитудном и фазовом режимах необходимо выполнить следующие условия: Z1 = Z2 = Z (равенство сопротивлений фаз статора); М12=0 (отсутствие вэаимоиндуктивности между обмотками статора); М13 = - М sin pα; М23 = М cos pα (изменение взаимоиндуктивности между обмотками статора и ротора по синусоидальному (косинусоидальному) закону в зависимости от угла поворота ротора в электрических градусах). При этом из выражения (10.15) находим для амплитудного режима работы
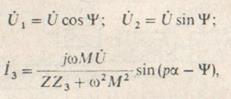
для фазового режима работы

Ошибки в работе индуктосина возникают в результате следующих причин: неравенства амплитуд полей обмоток статора; неточности фазовых сдвигов питающих напряжений; электромагнитной и емкостной связи между обмотками статора; наличия высших гармоник в коэффициенте взаимоиндукции обмоток статора и ротора. Эти ошибки могут быть проанализированы с помощью выражения (10.15).
§ 10.8. Погрешности вращающихся трансформаторов
Погрешностями ВТ называют величины, характеризующие точность отображения функциональной зависимости, вырабатываемой в том или ином режиме его работы.
Погрешности ВТ можно разбить на две группы:
1) систематические, характерные для данного типа ВТ и обусловленные принципом работы, выбранной конструкцией, применяемыми материалами, технологией производства, условиями эксплуатации; (несущественно изменяются от образца к образцу);
2) случайные, зависящие от технологического разброса свойств применяемых материалов, стабильности технологии, состояния и качества пооперационного контроля в процессе изготовления изделий. В некоторых случаях эти погрешности зависят от принятой методики экспериментальных испытаний ВТ.
Анализ статистических закономерностей распределения случайных погрешностей позволяет выяснить наиболее слабые стороны конструкции и технологии производства ВТ
При исследовании ВТ как электрической машины большое значение имеет анализ физической природы его погрешностей, позволяющий по допустимому значению ошибок ВТ определить требования к его конструкции и технологии производства.
В зависимости от физической природы погрешности ВТ подразделяют на четыре группы:
1) погрешности, вытекающие из принципа работы, т. с. Погрешности идеализированного ВТ, используемого в этом или другом режиме работы. Для СКВТ - это погрешности из-за неточности симметрирования, для ЛВТ-погрешности, вызванные отклонением зависимости
от линейной [см. (10.11)];
2) погрешности из-за конструктивных ограничений ВТ как электрической машины. Сюда относят погрешности ВТ вследствие несинусоидальнего распределения обмоток; изменения магнитной проводимости воздушного зазора из-за наличия пазов, а также нелинейности кривой намагничивания и гистерезиса;
3) погрешности, вызванные неточностью изготовления. К таким погрешностям относят эксцентриситет расточек статора и ротора ВТ, асимметрию магнитопровода, магнитное биение ротора и неточность скос паза:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.